Dispositivos de opto eletrônica podem ser usados de maneiras muito interessantes como por exemplo na fixação automática do foco de câmaras de TV e máquinas fotográficas. Neste artigo focalizamos um dispositivo deste tipo que pode medir a distância a que se encontra um objeto focalizado. Os componentes usados são dedicados de modo que, antes de tentar a montagem o leitor deve verificar sua disponibilidade. Trata-se, pois, de artigo muito mais com finalidade didática do que um projeto prático.
(*) Este artigo foi publicado numa revista dos anos 80. Usei o pseudônimo J. Martin
O dispositivo descrito neste artigo foi originalmente desenvolvido pela Texas Instruments para câmaras de filmagem. Acoplado a um sistema de controle ele permite a fixação da distância focal exata para a filmagem. É claro que, partindo do mesmo princípio pode-se usar o circuito em inúmeras outras aplicações práticas como por exemplo uma ultrassensível chave de proximidade num sistema de alarme.
Outra aplicação interessante é na detecção de nível em tanques, silos, quando o sensoriamento pode ser feito sem contato material com os elementos.
Medida de Fase
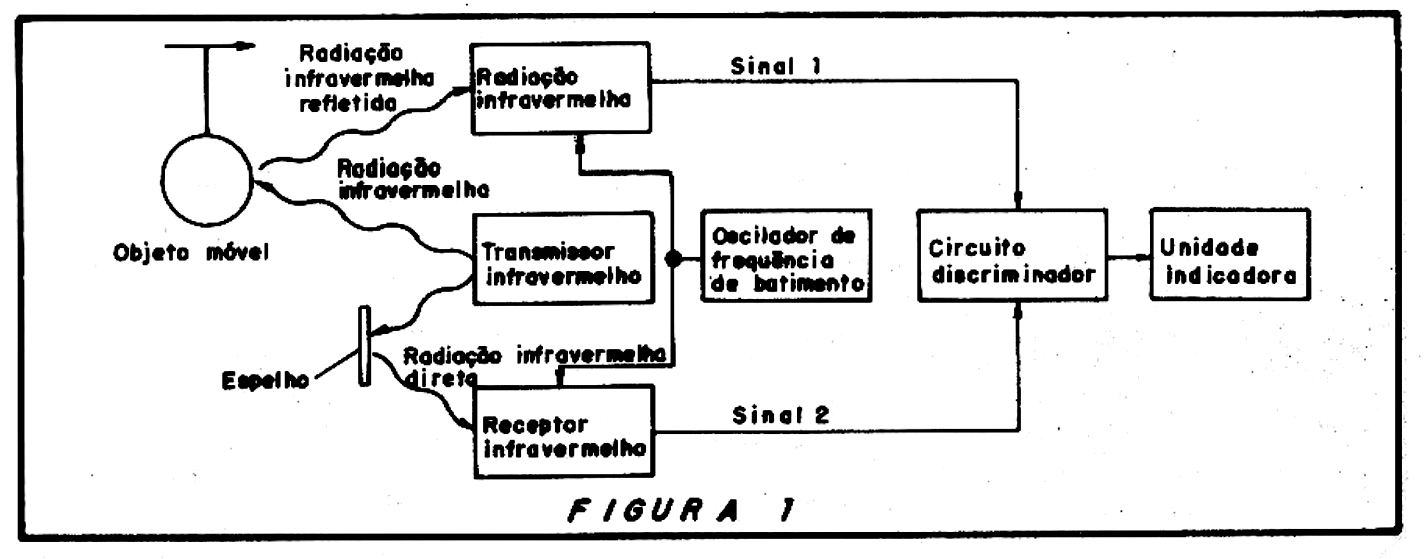
O princípio de operação deste sistema reside na medida da fase da luz que é captada. O aparelho descrito, de curto alcance, tem um diagrama de blocos mostrado na figura 1, a partir do qual podemos analisar seu funcionamento.
O sistema em questão permite a medida de distância de objetos fixos móveis numa faixa que vai de 1 a 15 metros. Analisemos sua operação:
O emissor transmite radiação infravermelha modulada que é opticamente focalizada sobre o objeto do qual se quer saber a distância. A radiação é modulada por um preciso oscilador controlado a cristal numa frequência de 4,433 MHz (a escolha desta frequência se deve a disponibilidade de cristais baratos na mesma).
Levando em conta que o deslocamento de fase é transportado na conversão de frequência, isso corresponde a uma diferença no tempo de propagação de sinal de alta frequência de:

De acordo com a equação (1), este tempo corresponde a uma distância de:

r = ± 2. 10-2m
Podemos ver que isso representa uma excelente precisão na medida de distâncias.
Na figura 2 temos o diagrama de blocos do aparelho sugerido.
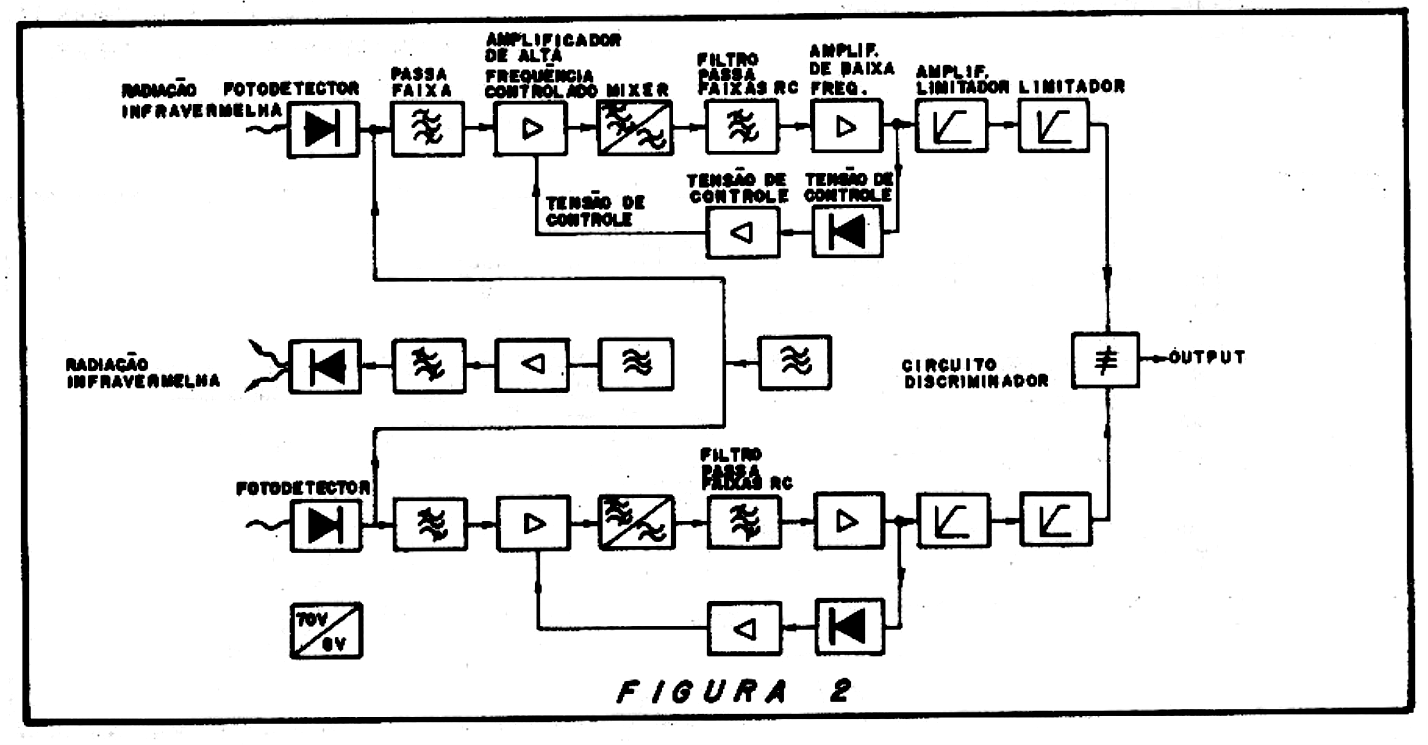
Dois receptores infravermelhos de mesmas características são usados. Cada receptor tem uma foto detector de entrada. A radiação infravermelha do transmissor é dirigida através de um sistema óptico de lentes ao objeto cuja distância deve ser medida. Na sua linha temos o sensor que recebe a radiação refletida. Um sistema de lente estreita o campo de recepção para esta radiação refletida.
Ao mesmo tempo uma pequena parte da radiação emitida é levada ao fotosensor do segundo receptor. Um pequeno espelho é usado para esta finalidade.
Este método, com dois receptores para a radiação infravermelha, elimina os efeitos dos deslocamentos de fase nas etapas do transmissor, já que as trajetórias dos sinais para os receptores 1 e 2 passam por etapas idênticas e, portanto, têm o mesmo deslocamento de fase.
A fotocorrente do sinal obtida no fotodiodo e a corrente original do oscilador de batimento chegam juntas ao filtro passa-baixas passando juntas para as etapas de amplificação e mixagem, onde a frequência-diferença é produzida.
Como as duas frequências têm uma pequena diferença entre sí, os efeitos de deslocamento de fase nos dois sinais são praticamente iguais, assim o sinal de baixa frequência resultante não tem nenhum erro perceptível na sua fase.
Como os amplificadores de baixa frequência também têm construção similar, deslocamentos de fase residuais que possam ocorrer nos filtros RC passa-baixas e no amplificador de baixa frequência se cancelam.
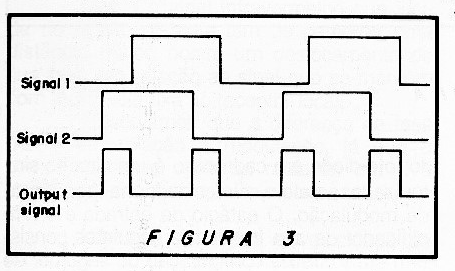
O elemento final do aparelho é o circuito discriminador. Este funciona como uma porta OU-exclusiva (Exclusive or) com a seguinte tabela verdade:
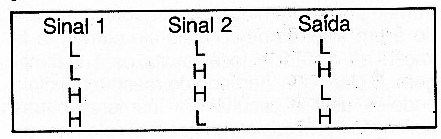
Conforme podemos ver pela tabela um sinal de nível H aparece quando existe uma diferença entre os sinais 1 e 2.
Na figura 3 mostramos que, se os sinais 1 e 2, levados a uma forma retangular pelo limitador tiverem fases diferentes, existem pontos em que os níveis são diferentes, portanto, há uma saída. Observamos também que a largura do sinal de saída tem uma duração igual ao deslocamento de fase entre os sinais 1 e 2. Tanto as bordas positivas como negativas dos sinais são usadas para formar o sinal de saída.
Por este motivo, o deslocamento de fase máximo que pode ser detectado tem limite em 180 graus.
Um instrumento de bobina móvel apropriadamente calibrado pode indicar a distância diretamente em metros. Pela integração de um circuito RC, uma tensão analógica, correspondente à distância pode ser obtida. Para efeito de controle, esta tensão pode excitar diretamente um circuito de atuação sobre servomotores.
Circuito Prático
Evidentemente, trata-se de um circuito didático já que os elementos ópticos e a própria utilização de componentes não existentes no nosso mercado dificultam sua realização pelo amador.
Na figura 4 temos o circuito do transmissor com todos os valores de projeto.
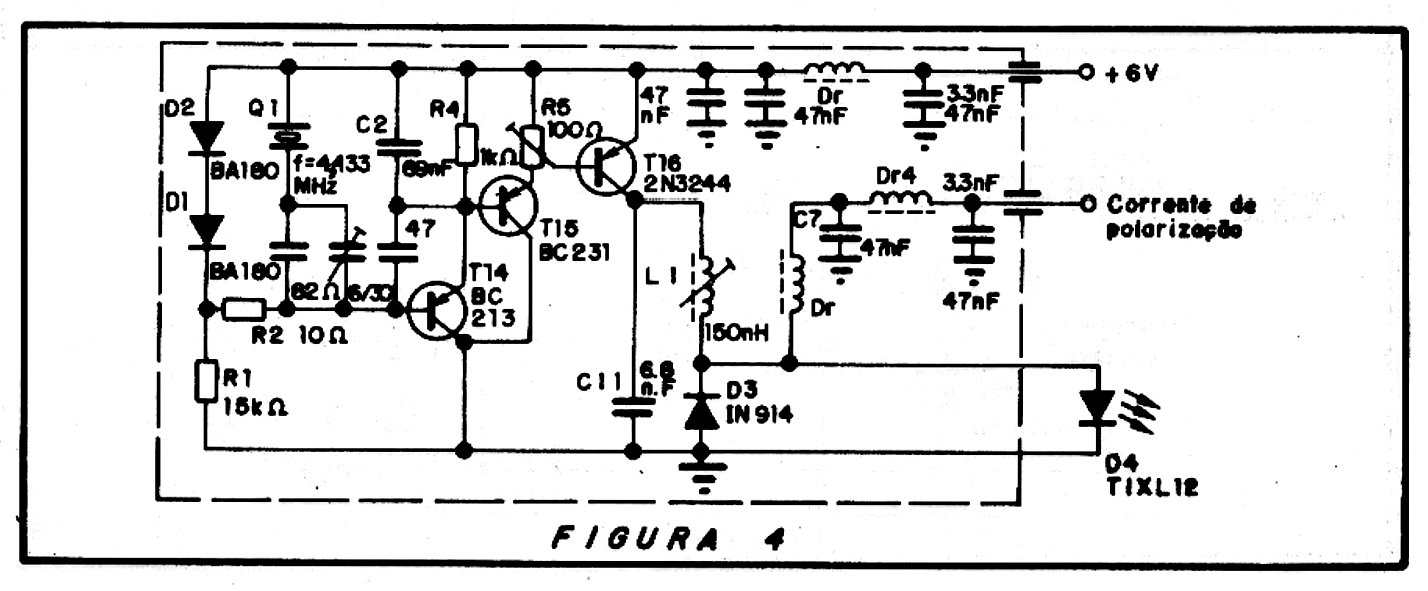
O oscilador estabilizado a cristal excita uma etapa de modulação T16 através do seguidor de emissor T15. O circuito sintonizado paralelo no terminal do coletor de T16 está sintonizado na frequência do oscilador em 4,433 MHz. O ponto de operação do estágio modulador é fixado pelo potenciômetro R5. O emissor de GaAs é ligado em série com a bobina L1. Desta forma, a corrente de modulação é maior que a corrente no coletor do transístor em vista do fator Q do circuito sintonizado.
Como os emissores possuem uma baixa tensão de ruptura, o TIXL12 é protegido contra potenciais negativos por um diodo de uso geral 1N914 em oposição. O diodo emissor pode operar com ou sem corrente de polarização, como o leitor quiser.
Acoplamentos diretos e indiretos do transmissor para o receptor são prevenidos por várias medidas. Uma delas consiste numa blindagem eletromagnética. O receptor principal, o receptor de referência e o oscilador auxiliar devem ser blindados individualmente.
As linhas de alimentação são dotadas de filtros indutivos para evitar a passagem dos sinais de RF de uma etapa para outra. Em geral, todos os fios são mantidos curtos e alguns são blindados.
Na figura 5 temos o circuito completo dos receptores principal e de referência. A diferença entre os dois receptores está no fato de que o principal contém um fotodiodo mais sensível do tipo avalanche de silício enquanto que no de referência temos um fotodiodo com baixa corrente no escuro e alta frequência de limitação.
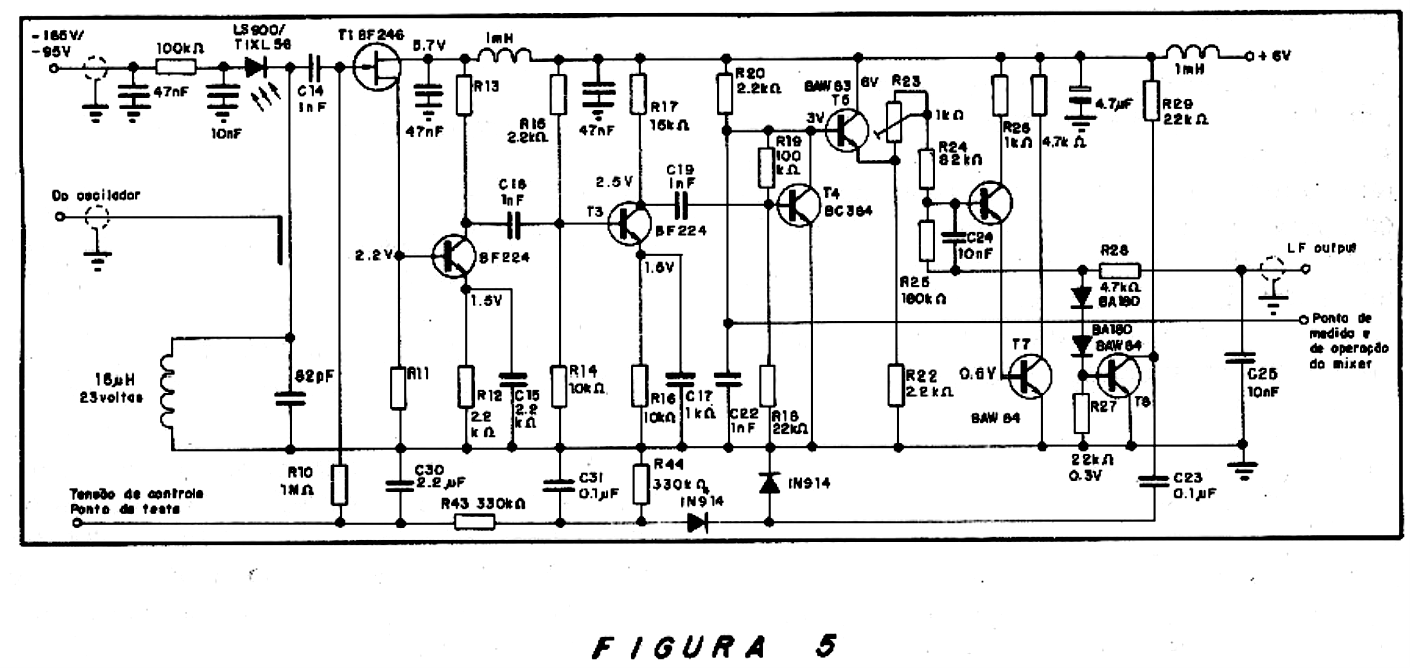
A tensão inversa de aproximadamente 165 a 170V aplicada ao diodo de avalanche como sensor deve ser ajustada para a relação sinal/ruído mais favorável. A tensão reversa é estabelecida com uma precisão de 0,1%. A impedância de carga do fotodiodo em cada caso é um circuito sintonizado paralelo, sintonizado na frequência de modulação, O estágio de entrada e o amplificador de alta frequência seguintes consistem em FETs na configuração de seguidor de emissor.
Com isso, o amortecimento do circuito sintonizado é muito leve. O ponto de operação do FET é determinado pela tensão de controle, de acordo com o sinal recebido. Para isso, os semiciclos positivos do sinal de baixa frequência são amplificados por T8. Do sinal de salda de T8, a tensão de controle é obtida através de um retificador. A constante de tempo do filtro de controle de tensão é projetada de tal forma que grandes variações no nível de recepção, que ocorram em sucessão rápida, sejam bem compensadas pela tensão de controle.
Como fonte de radiação infravermelha modulada é usado um LED de arseneto de gálio (GaAs).
No receptor de radiação infravermelha, que forma parte de um sistema fixo, que também tem a fonte de radiação, temos o sensor. A partir deste sensor, a radiação é primeiramente demodulada para que se recobre a sua componente de baixa frequência. O detector usado, dada a alta frequência de operação, é um diodo rápido de silício.
Um segundo sensor existe no sistema para receber a mesma radiação emitida.
Temos então dois receptores que operam com o mesmo sinal, mas que percorre distâncias diferentes.
Corno o sinal infravermelho que incide no objeto distante tem de percorrer uma distância maior, ocorre um deslocamento de sua fase em relação ao sinal o qual se mantém com incidência fixa no receptor local.
Observamos que a diferença de fase ocorre em relação à modulação, já que o comprimento de onda da radiação em si é muito pequeno para que isso possa ser detectado.
Levando em conta a velocidade da luz, a partir do tempo que medimos entre dois picos do sinal de modulação defasados e captados por sensores diferentes, podemos facilmente determinar a distância do objeto. A fórmula será:
t = 2 x r/c
Onde: t é tempo em segundos entre os dois picos do sinal defasado.
r é a distância em metros
c é a velocidade da luz em metros por segundo (300 000 000 m/s) Observe a presença do fator 2 que se deve ao fato do sinal infravermelho ter de ir e voltar até o objeto visado, com um percurso igual ao dobro da distância.
Para o deslocamento de fase temos:
Das fórmulas (1) e (2) temos:
Para uma frequência de 4,433 MHz e urna distância de 10 metros, o deslocamento de fase obtido é de:

Para o circuito analisado, medidas de fase são possíveis com ângulos de até aproximadamente 180 graus. Isso numa frequência de 4,433 MHz significa uma distância máxima de aproximadamente 16,9 metros.
É importante observar que, como se mede deslocamento de fase, os resultados são completamente independentes da amplitude dos sinais, recebidos pelo fotodetector. Do mesmo modo é preciso que exista uma boa estabilidade de funcionamento para que a medida seja possível.
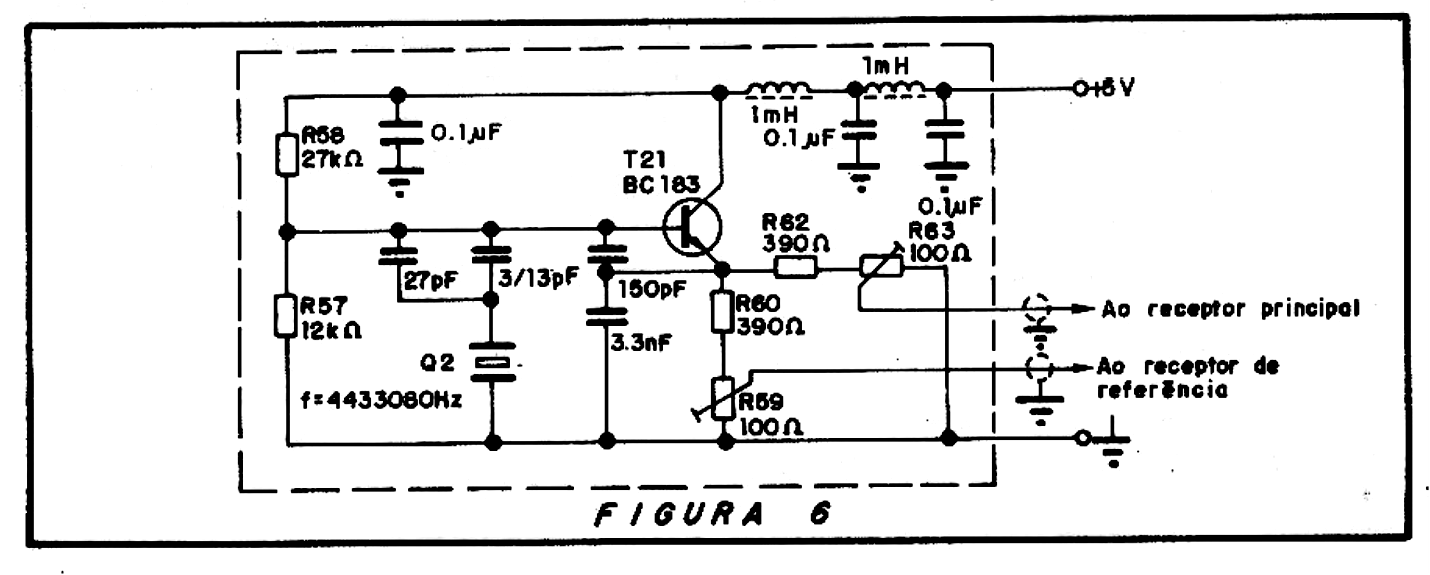
Pelo uso deste método, que também é usado em outros medidores de fase, pela superposição de uma frequência auxiliar a partir de um segundo oscilador, o sinal recebido é transposto para uma frequência mais baixa sem perder o deslocamento de fase original. Por razões de estabilidade, este oscilador de batimento também é controlado a cristal. Sua frequência é 80 Hz mais elevada que a frequência do transmissor. Obtemos então na etapa de mixagem um sinal de batimento de 80 Hz.
Seguindo o estágio de mixagem temos um amplificador de baixa frequência com componentes comuns. Para evitar a presença de sinais interferentes, o sinal tem sua amplitude limitada em estágios limitadores subsequentes. Isso é possível porque a informação desejada que é o deslocamento de fase não está na amplitude dos sinais, mas sim nos instantes em que ocorrem as passagens por zero das tensões que eles representam. Circuitos simples transistorizados podem ser usados.
Além disso, com a conversão de frequência de 4,433 MHz para 80 Hz obtém-se um considerável aumento da precisão. Uma diferença de fase de apenas 1/4 de grau pode ser detectada em 80 Hz, o que significa uma distância de: