










Os LVDTs (Linear Variable Differential Transformers) ou Transformadores Lineares Diferenciais Variáveis são transdutores de deslocamento linear muito usados em aplicações industriais. Como funcionam esses transdutores e alguns cuidados na sua escolha e uso serão analisados neste artigo, baseado em documentação fornecida pela National Instruments (www.ni.com).
A medida do deslocamento de uma peça numa máquina ou num sistema automatizado qualquer é fundamental em dados momentos.
O deslocamento pode ser a rotação de uma peça cilíndrica ou ainda um deslocamento linear. Para a realização das medidas de deslocamento lineares em especial, existem diversos tipos de sensores. Um deles é justamente o LVDT ou Transformador Linear Diferencial Variável de que trataremos neste artigo.
Medindo o Deslocamento Linear
Definimos deslocamento linear de um objeto a diferença entre as posições iniciais medidas ao longo de um eixo único, conforme mostra a figura 1.
Na medida de um deslocamento deve-se ser levado em conta tanto a sua amplitude (distância percorrida) como o sentido e a direção em que isso ocorre ao longo de um eixo.
Nas aplicações industriais e de automação, os deslocamento típicos que devem ser medidos são especificados em milímetros ou ainda em polegadas.
O LVDT
Existem diversas tecnologias possíveis para o uso de sensores na medida de deslocamentos. No entanto, uma das mais tradicionais é a que faz uso de um transformador diferencial, denominado LVDT.
Conforme mostra a figura 2, um LVDT consiste num transformador com um enrolamento secundário duplo e um enrolamento primário simples.
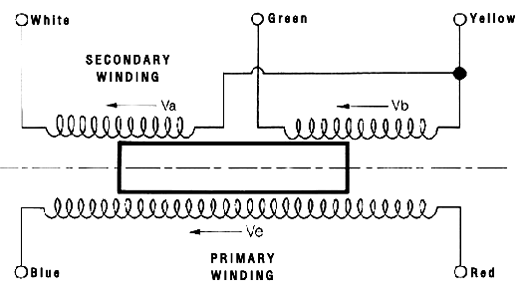
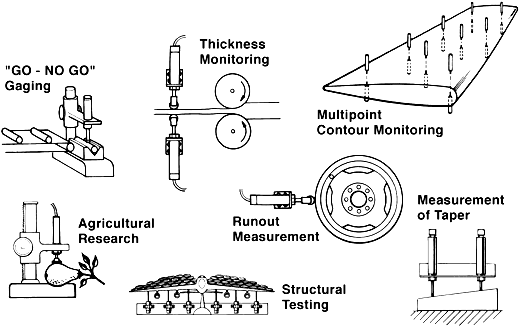
O núcleo desse transformador é móvel, sendo acoplado ao mecanismo ou meça do qual se deseja monitorar o deslocamento, conforme mostra a figura 3, em que temos diversas aplicações possíveis para os sensores de deslocamento.
O enrolamento primário é então excitado por um sinal alternado cuja freqüência depende da aplicação, sendo normalmente usada a própria tensão da rede de energia.
O sinal aplicado no primário induz nos secundários tensões que dependem basicamente de dois fatores: o tipo de material usado no núcleo e sua posição.
Se o núcleo estiver centralizado, as tensões induzidas nas bobinas são tais que se cancelam e com isso a tensão medida nos terminais dio secundário do transformador é nula.
Quando o núcleo se desloca pela movimentação do objeto em que ele está acoplado, a indução dos sinais nas duas bobinas se altera e com isso a tensão medida na saída deixa de ser nula.
Tanto maior o deslocamento, maior é a tensão medida na saída, conforme mostra a figura 4.
Esse tipo de configuração apresenta diversas vantagens interessantes que devem ser levadas em conta ao se fazer sua escolha para uma aplicação.
Uma delas está no fato de que o acoplamento entre as bobinas é feito através de um núcleo sem qualquer contacto elétrico e de simplicidade muito grande. Isso garante uma robustez muito grande para esse sensor que praticamente não sofre desgaste.
Outro ponto importante é que a tensão de saída depende do fluxo significando uma resolução infinita (o que não ocorre com os sensores de deslocamento digitais). Na figura 5 temos um LVDT comum de uso industrial.

Figura 5 – um LDVT comum.
Observe o tamanho do sensor quando comparado a um “clipe “ comum.
Usando o LVDT
Pelo que foi explicado, podemos concluir que um LVDT associa a posição de um objeto à intensidade de um sinal de saída.
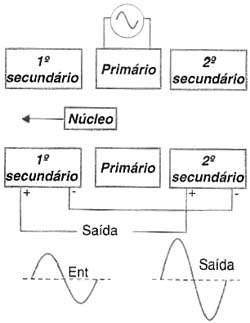
Como os sinais induzidos nas duas bobinas estão em oposição de fase de modo a termos um nulo na posição central, é fácil perceber que em torno desse ponto de nulo, conforme o sentido do deslocamento, poderemos ter sinais com fases opostas. Isso é mostrado na figura 6.
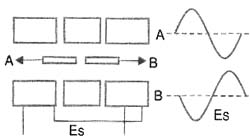
Assim, podemos associar à amplitude do sinal o valor do deslocamento do objeto e pela fase o sentido desse deslocamento em relação à posição de referência.
Precisão e Linearidade
Quando se trata de sensores, a precisão e a linearidade são as características mais importantes que os projetistas observam.
Os LVDTs são construídos de tal forma que dentro da faixa de deslocamentos para os quais são especificados sua linearidade é a mais possível.
Na figura 7 mostramos a curva típica de resposta de um LVDT, observando-se que, quando o núcleo começa a “escapar” da ação do campo criado por uma das bobinas, a linearidade é afetada.
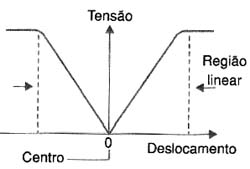
Isso vai ocorre justamente nos extremos de sua trajetória, ou seja, quando os deslocamentos nos dois sentidos se aproximam e passam do máximo.
Para posicionar um LVDT corretamente é preciso aplicar o sinal na bobina primária e depois deslocando o sensor no sentido que se pretende ser positivo, verificar se a fase obtida na saída corresponde, conforme mostra a figura 8.
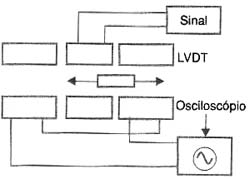
É claro que, uma vez posicionado, se for constatada a inversão, basta inverter a polaridade da bobina primária.
A saída de um LVDT consiste num sinal senoidal na freqüência de excitação. Para os tipos comuns essa freqüência varia entre 50 Hz até 25 kHz.
A escolha da freqüência depende da aplicação normalmente sendo selecionada em função da possibilidade do deslocamento a ser medido estar numa peça que realize movimentos rápidos.
Nessas condições a freqüência deve ser pelo menos 10 vezes maior que a freqüência do deslocamento do núcleo do transformador. Nesse caso, o sinal da saída do circuito é convertido numa tensão contínua passando por um circuito condicionador.
Na figura 9 mostramos um circuito com LVDT sofisticado que faz uso de um circuito condicionador de sinais.
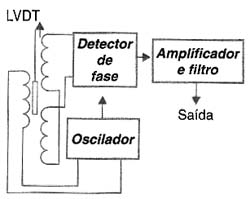
Nesse circuito é usado um oscilador para fornecer o sinal de excitação do LVDT e na saída um condicionador de sinais para operação numa faixa ampla de velocidades.
Nesse caso as unidades para a medida são expressas em mV/V/mm ou ainda mV/V/in (in = polegada).
Uma configuração desse tipo pode alcançar linearidades de 0,25% na faixa de atuação do LVDT, ou seja, na amplitude possível dos movimentos do núcleo.
No entanto, nas aplicações modernas, os LVDTs são conectados a sistemas de aquisição de dados que transferem diretamente os sinais na forma digital para circuitos de controle com base em microcontroladores, microprocessadores e PCs.
A National Instruments (www.ni.com), por exemplo, oferece para a aquisição de dados de LVDTs o módulo SCXI-1540 com 8 canais especialmente projetado para operar com esse tipo de sensor.
O módulo proporciona o condicionamento dos sinais obtidos em transformadores como os usados nos LVDTs e também para sensores rotacionais equivalentes, os RVDT (Rotary Variable Differential Transformers).
Além disso, o módulo possui auto-calibração sem a necessidade de se usar hardware externo, mas tão somente o software da National NI-DAQmx.
A taxa de amostragem vai até 333 ksps (3 microsegundos por canal) e cada um desses módulos pode multiplexar seus sinais num único canal para um sistema de aquisição de dados (DAQ).
O módulo trabalha com interface USB de modo a se implementar um sistema plug-and-play de aquisição de dados com facilidade. Na figura 10 temos o módulo SCXI-150.

Figura 10 – Um módulo para LVDT
Na figura 11 temos um sistema de condicionamento de sinais da National indicado para aplicações com sensores LVDT.

Figura 11 – Sistema de condicionamento de sinais para sensores LVDT.
Conclusão
Para aplicações em que o deslocamento de partes móveis de uma máquina ou automatismos sejam exigidos, o uso do LVDT apresenta inúmeras vantagens.
A partir do conhecimento de seu princípio de funcionamento e de suas qualidades o profissional pode escolher com muito mais facilidade o tipo ideal e se esse tipo de sensor é o mais apropriado para aplicação visada.





