










O desenvolvimento de automatismos modernos, que sejam controlados a partir de circuitos lógicos, microprocessadores, microcomputadores com grande precisão envolve a utilização de motores de passo. No entanto, a disponibilidade de dados e 'informações que facilitem a elaboração dos projetos é um obstáculo até mesmo maior do que a obtenção dos próprios motores e dos elementos mecânicos associados. Neste artigo mostramos em diversos circuitos práticos como controlar um motor de passo com base num único integrado especialmente projetado para esta finalidade.
Obs. O artigo é de 1990. Existem configurações mais modernas para o controle de motores.
A precisão de movimentos de mecanismos como as leitoras de discos rígidos ou disquetes em microcomputadores, de cabeças de impressão em impressoras e dos braços de robôs usados em aplicações experimentais, industriais e até mesmo na pesquisa depende fundamentalmente de um tipo especial de motor que é o motor de passo.
No entanto, o motor de passo sozinho não nos leva a dispositivos precisos, já que necessitamos de uma série de elementos de controle externo que envolve a eletrônica.
Desta forma, associados ao desenvolvimento dos motores de passo, surgiram diversos circuitos integrados especiais justamente projetados para controlar estes novos elementos mecânicos, intimamente ligado à nova ciência que se desenvolve que é a “robótica” (mecatrônica).
Um dos integrados mais versáteis para o controle destes motores de passo é o SAA1027 (Philips Componentes) e que pode servir tanto para aplicações práticas importantes como até mesmo para o estudo de aplicações e desenvolvimento em escolas ou laboratórios de robótica.
O SAA1027 é projetado para controlar motores de passo de 4 fases e pode servir para as seguintes aplicações:
- Braços ou robôs completos
- Impressoras
- Automatismos mecânicos diversos
- Controle remoto
- Máquinas de escrever eletrônicas
- Plotters
Neste artigo daremos os circuitos básicos que permitem a utilização deste integrado no controle de diversos tipos de motores de passo de 4 fases, possibilitando assim que os leitores partam para a elaboração de seu próprio projeto de robô, impressora, controle remoto, ou seja lá o que for.
Os motores de passo, consistem em elementos especiais da família dos motores de corrente contínua, sendo dotados de diversos enrolamentos de fase, conforme mostra a figura 1.

Para girar o eixo deste tipo de motor aplicamos pulsos. Cada pulso faz com que o eixo se desloque de um ângulo preciso que varia normalmente entre 1,8 e 7,5 graus.
Com uma seqüência apropriada de pulsos podemos fazer com que o eixo gire em qualquer direção e mais do que isso, se posicione em locais bem precisos, múltiplos do valor do passo.
A figura mostra um motor de 4 fases, observando-se que o rotor formado por uma espécie de roda dentada se posiciona sempre em relação à bobina que for energizada.
Este tipo de motor é denominado “relutância variável”.
Veja que neste motor, temos intervalos de 15 graus entre as bobinas de fase, o que significa que o seu passo tem este valor. Passos menores são obtidos pela utilização de mais bobinas.
Para calcular o valor do passo, do motor aplicamos a seguinte fórmula:
X = 360/(f x n)
Onde:
X é o valor do passo em graus
f é o número de fases
n é o número de dentes do rotor
Uma variação amplamente usada de motor de passo é o chamado tipo híbrido que tem o mesmo princípio do motor que vimos (relutância variável), diferindo apenas quanto a construção interna que leva imãs permanentes para a produção de um campo magnético interno.
O INTEGRADO SAA1027
O circuito integrado SAA1027 da Philips Components, consiste num driver para motores de passo de 4 fases com dois estatores.
O circuito basicamente consiste num contador direcional de 4 estados e um conversor de código capaz de excitar quatro saídas na seqüência necessária ao funcionamento de um motor de passo.
O SAA1027 pode excitar diretamente motores de passo com tensões de trabalho de 9,5 à 18 Volts e corrente de até 500 mA.
Na figura 2, temos o invólucro deste integrado e o seu diagrama de blocos interno.

Observe a existência de buffers que isolam o circuito de comando externo de todo o circuito de controle. Os sinais destes buffers são aplicados a um contador up/down de dois bits e daí a um conversor de código.
A partir do conversor de código temos os estágios de saída que excitam transistores de potência capazes de fornecer a elevada corrente exigida pelos motores de passo comuns.
Para correntes maiores que 500 mA, fornecemos algumas sugestões de etapas adicionais que podem ser usadas nos projetos.
Observe que as saídas do integrado vão ao nível baixo para a excitação da bobina correspondente.
Os únicos componentes externos são elementos cujos valores dependem do tipo de motor usado.
Assim, para o circuito de alimentação temos a divisão em dois setores, sendo um de alta corrente para o motor e o outro de baixa corrente com filtragem adicional dada por R1 e C1.
O resistor Rx ligado ao circuito de alta corrente determina a máxima corrente que será aplicada ao motor de passo, e seu valor é dado pela fórmula:
Rx = ( 4 * V / I – 60 )
Onde:
Rx é o valor do resistor em Ω
V é a tensão de alimentação em volts
I é a corrente desejada em cada fase do motor em ampères.
Para uma corrente de 100 mA temos um valor típico de Rx de 420 Ω, enquanto que para 320 mA o resistor será da ordem de 82 Ω.
Os terminais de controle funcionam da seguinte maneira:
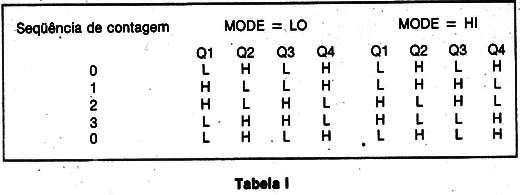
A entrada RESET é mantida no nivel alto, para que a cada transição positiva do terminal COUNT tenhamos uma mudança de estado nas saídas do integrado.
Esta seqüência dependerá do nível aplicada à entrada MODE que determina o sentido da rotação do motor.
Temos então duas seqüências possíveis que correspondem a rotação do motor no sentido direto ou no sentido inverso, o que é dado na tabela l.
Se levarmos a saída RESET ao nível LO o contador levará as saídas a posição correspondente ao O da seqüência de contagem.
O circuito integrado é do tipo open collector nas saídas. De modo a se evitar problemas de sobretensão nas mesmas, quando da comutação de uma carga indutiva como a representada pelos enrolamentos do motor, são usados diodos de proteção.
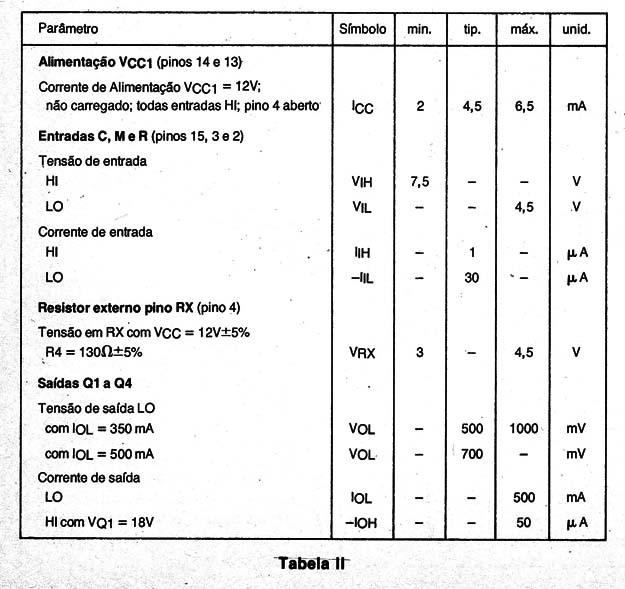
No circuito equivalente observamos a colocação destes diodos. As principais características deste integrado são:
Faixa de tensões de alimentação (VOC) = 9,5 a 18 V
Corrente sem carga (ICC tip) = 4,5 mA
Tensões de entrada (em todas as entradas): Hl (VIH min) = 7,5 V LO (VlL max) 2 4,5 V
Corrente de entrada (IOL max) = 30 ,uA
Corrente de saida (-IOL max) = 500 mA
Na tabela ll temos as características para uma tensão de alimentação de 9,5 a 18 V, com VEE = 0 V, e uma faixa de temperatura de operação de -20 à + 70C.
APLICAÇÕES:
a) Controle Manual e Automático
O circuito figura 3 e ideal para aplicações didáticas e de desenvolvimento de projetos de robótica, pois permite o controle de um motor de passo manualmente ou então de modo automático, mas com ação bastante lenta o que

O funcionamento deste circuito permite visualizar cada movimento de o seguinte:
A chave S4 seleciona o modo de funcionamento do motor (MODE), ou seja, se ele vai se movimentar no sentido horário ou anti-horário.
Com a chave conectando a entrada ao nível alto (HI) o motor gira no sentido horário e na posição LO o motor gira no sentido anti-horário.
A chave S2 seleciona se o acionamento é manual ou automático.
No acionamento manual temos um interruptor de pressão que produz os pulsos capazes de produzir o avanço do motor;
O capacitor CS em conjunto com R4 garante a eliminação dos repiques, mas para uma segurança maior na produção de pulsos únicos também pode ser usado o circuito da figura 4.

A cada pulso do interruptor de pressão o motor avança (ou recua) um passo de forma precisa.
Na posição de acionamento automático colocamos no circuito um oscilador que produz um trem de pulsos cuja velocidade pode ser ajustada pelo potenciômetro P1.
A freqüência máxima de operação do acionamento automático está em torno de 60 Hz o que corresponde para um motor de passo de 7,5 graus o que corresponde a 75 rpm de velocidade máxima.
É claro que, para a velocidade mínima não há limite, já que com um capacitor de 1000 µF e um potenciômetro de 1 M podemos obter pulsos em intervalos de até mais de meia hora o que nos dá uma volta a 24 horas aproximadamente.
Dependendo do tipo de motor usado podem ser empregadas freqüências mais elevadas de acionamento, mas isso depende da aplicação que se tem em mente.
Um outro circuito de acionamento automático emprega um oscilador CMOS com o 4093 que é mostrado na figura 5.

Este circuito pode ser controlado externamente, por exemplo, com o gatilhamento a partir de Sensores ou mesmo de outros circuitos digitais.
A freqüência também é ajustada no potenciômetro e sua faixa é tão ampla como a obtida pelo 555.
b) Controle Óptico
Uma aplicação experimental que também pode servir de base para um projeto de robótica é mostrada na figura 6 onde temos dois tipos de acionamento por controle remoto.

A incidência de luz no LDR1 faz com que seja iniciada a produção do trem de pulsos. Esta produção tem a duração dada pelo monoestável com o 555 e pode variar entre alguns segundos até mais de meia hora.
Por outro lado, a incidência de luz no LDR2 faz com que tenhamos a reversão do sentido de rotação. Com a utilização de um monoestável como o 555 mostrado na figura a reversão ocorre por tempo limitado que pode ser ajustado no trimpot.
No entanto, podemos Utilizar um flip-flop como o 4013 para que a reversão seja bi-estável. Com um pulso no LDR2 a rotação inverte. Para que ele sofra uma inversão, voltando ao modo anterior, deve ser aplicado novo pulso ao LDR, conforme mostra a figura 7.

O modo de acionamento sugerido, por meio de feixe de luz infravermelho, é apenas uma sugestão, já que facilmente podem ser desenvolvidos outros tipos de controle externo como, por exemplo, fazendo uso de sinais de rádio, via rede, campo magnético ou mesmo ultrassons.
Mas, sem dúvida uma modalidade de acionamento bastante interessante que pode ser aproveitada em automatismos e robótica é a que corresponde a informações que o próprio dispositivo capta do meio ambiente, ou seja, um sistema de olhos, por exemplo, usando os LDRs, ou ainda sensores de contacto (fim de curso) ou aproximação (capacitivos).
Veja o leitor que este simples circuito abre possibilidades ilimitadas para aplicação num projeto de robô.
c) Acionamento por Microprocessador
Para o acionamento a partir de um micro precisamos de uma simples interface que é mostrada na figura 8.

Esta interface é ligada na porta de saída (l/O), e basta lembrar que, os níveis altos aplicados nas bases dos transistores, correspondem a níveis baixos nas entradas correspondentes do integrado SAA1027, pois na configuração de emissor comum, com a saturação do transistor, temos uma inversão de níveis lógicos.
Os transistores usados podem ser os BC548 ou mesmo, para uma comutação mais eficiente os 2N2222.
Para este circuito, o nível baixo corresponde a uma tensão que deve ficar em menos de 1V, e o nível alto será reconhecido se a tensão de entrada for superior a 3,5 Volts.
Uma das desvantagens deste circuito está no fato de que não há isolamento entre o circuito do motor de passo e o microcomputador.
Este inconveniente, que pode ser importante em aplicações mais criticas, é contornado com a utilização de uma interface com acopladores ópticos como é mostrada na figura 9.

Este mesmo circuito também serve de base para controles de motores de passo a partir de circuitos lógicos diversos.
d) Etapas de Potências
Para o acionamento de motores de passo de maior potência, com correntes superiores aos 500 mA que o integrado pode fornecer, temos diversas possibilidades. Uma delas, que permite o controle de motores com correntes de até 2 ou 3 ampères por fase é mostrada na figura 10.

O transistor TlP32 deve ser montado num radiador de calor. Evidentemente, para um motor de 4 fases precisamos de 4 transistores nesta configuração, ligados um a cada saída do integrado.
Com a utilização dos transistores PNP neste circuito a ida da saída ao nível baixo (LO) faz com que o transistor inicialmente em corte passe para a saturação energizando assim a fase correspondente do motor.
Uma possibilidade interessante, mostrada na figura 11 consiste no uso de transistores NPN de potência, mas com a pré-excitação a partir de um PNP.

Com o uso de um 2N3055 podemos controlar um motor com fase de até 5 ampères, nas mesmas condições do circuito anterior. Lembramos que os transistores devem ser montados em bons radiadores de calor.
Esta aplicação também é válida para alguns tipos de motores que possuem um terminal comum positivo para todos os enrolamentos do motor de passo.
MOTORES DE PASSO NACIONAIS (em 1990)
Um dos fabricantes de motores de passo em nosso pais é a SINGER do Brasil Indústria e Comercio Ltda. (Caixa Postal 203 - Itú - CEP 13300 – São Paulo - SP - Brasil) e que possui diversos modelos de motores em sua linha que se adaptam aos circuitos propostos neste artigo.
Dentre eles destacamos o Modelo BP 7,5° que tem as dimensões mostradas na figura 12 e características elétricas dadas a seguir.

Passos por volta: 48
Angulo de passo: 7,5 graus
Fases: 4 (enrolamento bifilar)
Resistência por bobina (25°C): 8 Ω (máx)
Indutância por bobina: 7 +/-3 mH a 1 kHz
Cabos de saída (6): 26 AWG
Mancais: bronze sinterizado
Torque estático (pico): 80 + /- 15 mN.m (com corrente nominal)
Corrente nominal (por bobina em condição estática): 700 mA (DC)
Precisão de passo: +/-0,5°/o
CONCLUSÃO
O circuito que damos é evidentemente uma configuração básica mas que pode ser de extrema utilidade para os leitores que desejam construir seu próprio robô ou ainda dispositivos eletro-mecânico de precisão como, por exemplo, impressora, plotter, etc.
O modo como o controle de motor de passo vai ser feito depende da aplicação e para isso existem centenas de possibilidades. Estas possibilidades podem ser encontradas em outros artigos de nosso site.





