










Automatismos industriais, equipamento controlado numericamente, impressoras, servomecanismos, fax e plotters, são alguns exemplos de aplicações onde encontramos motores elétricos. Para o controle de tais motores existem dispositivos especiais cujas características podem variar numa ampla margem de valores, dependendo da aplicação específica e que por isso pode causar alguma dificuldade ao projetista. Neste artigo, abordamos alguns circuitos integrados específicos para esta finalidade, fabricados pela NATIONAL SEMICONDUCTOR agora Texas Instruments.
Motores de corrente contínua para as aplicações que citamos na introdução operam com correntes relativamente elevadas e, além disso, exigem um controle de precisão que depende da sua finalidade.
Muitos circuitos integrados têm sido desenvolvidos pela National Semiconductor especificamente para controlar esses motores, além de possuírem uma ampla linha deles.
Neste artigo focalizamos alguns desses integrados de potência, com aplicativos que podem ser de grande utilidade para os leitores que trabalham em áreas de projetos industriais, especificamente ligados à mecatrônica.
LMD18200
Este circuito integrado consiste num controle de motores em ponte para correntes de até 3 A e tensões de até 55 V, sendo fornecido em invólucro SIL (Single In Line) de 11 pinos.
Na saída de potência deste componente temos FETs de potência que apresentam uma resistência em condução extremamente baixa, da ordem de 0,3 Ω.
Suas entradas são compatíveis com lógica TTL e CMOS e, além disso, ele possui diodos de proteção (clamp) nas saídas.
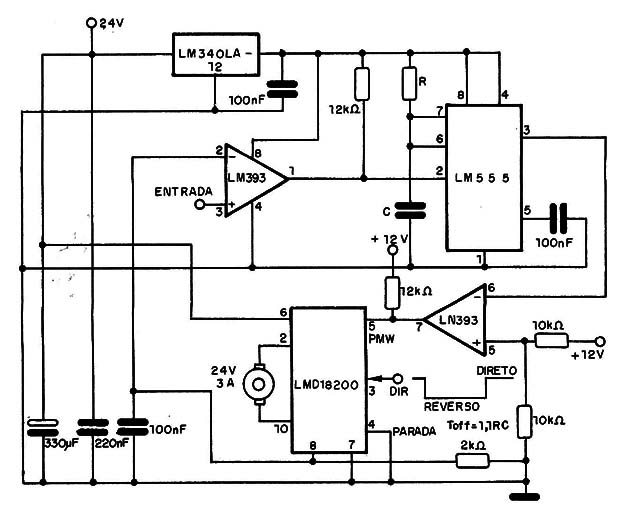
Na figura 1 temos um circuito de aplicação para este componente.
Trata-se de um controle com tempo-off fixo.
Ele controla a corrente no motor aplicando uma tensão média igual a zero por um tempo fixo, quando a corrente do motor excede a corrente do programa, isso faz com que a corrente no motor varie levemente em tomo de um nível médio de controle externo.
A duração do tempo-off é ajustada por RC no circuito LM555.
Na figura 2 temos as formas de onda obtidas para este tipo de controle.

Um Regulador de Torque é mostrado com base no mesmo componente LM18200, na figura 3.

O outro circuito integrado usado nesta aplicação (LM3525A) é um controle PWM de uso geral.
A saída sensora de corrente do LM18200 é usada para detectar a rotação do motor em função de sua carga e realimentar o controle PWM.
Um Regulador de velocidade com base nos dois circuitos integrados da aplicação anterior é mostrado na figura 4.

Para se obter um sinal de controle em função da velocidade do motor é usado um tacômetro que deve produzir 1 V para cada 1 000 RPM do motor.
Desta forma, obtém-se um controle preciso para velocidades entre 0 e 7 400 RPM em um motor de 30 V.
A velocidade desejada é ajustada no potenciômetro ligado ao pino 1 do LM3525A.
É importante observar que existe uma correspondência linear entre a tensão no pino 1 do LM3525A, ajustada pelo potenciômetro de 1 kQ e a velocidade obtida para o motor.
LM18201
Este outro circuito da National Semiconductor, apresentado em invólucro SlL de 11 pinos pode controlar motores de 3 A com tensões de até 55 V.
Trata-se de um controle em ponte, com 4 FETs de potência combinando tecnologia CMOS com DMOS no mesmo chip.
A resistência dos FETs de potência quando saturados é tipicamente de 0,33 Ω o que garante excelente rendimento no controle das cargas.
As entradas são compatíveis tanto com lógica TTL como CMOS e existem diodos “clamp" de proteção em paralelo com os FETs de potência.
Dentre as aplicações sugeridas pelo fabricante. temos o controle de motores de passo, servos, robôs para automação industrial, impressoras e plotters.
Na figura 5 temos um circuito típico de aplicação para este componente.

Este circuito controla um motor a partir de sinais vindos diretamente de um controle PWM do tipo LM629.
Este controle pode atuar sobre o motor de modo a se obter tanto a velocidade desejada como posição.
A diferença em relação ao LM18200 é que nele temos uma saída para sentir a corrente pelo motor, a qual é ligada a um dos transistores DMOS de potência.
Já no LM18201, não temos tal saída e no caso de precisarmos por um sinal de controle em função da corrente, será preciso usar um ÍBSÍSÍOI' externo para gerar esta tensão.
Este resistor, tipicamente de 0,1 Ω é ligado ao pino 7 (terra), conforme mostra a figura 6.

Obtém-se desta forma uma tensão de 0 a 0,3 V quando a corrente no motor varia de 0 a 3 A.
O valor deste resistor está limitado pela tensão máxima que pode existir entre o pino 7, que é o terra do setor de potência e o A pino 8, que é o terra do controle.
Esta tensão deve ficar obrigatoriamente na faixa de -1 V a +0,5 V.
Quando há a recuperação reversa do motor, picos de corrente no motor podem fazer com que esta tensão seja excedida, mas como isso ocorre por
intervalos que não excedem 100 ms, não existe perigo para a integridade do LM18201.
LM18293
Este Driver para cargas de até 1 A com quatro canais em push-pull é apresentado pela National Semiconductor em invólucro DIL de 16 pinos.
No entanto, na sua capacidade limite de operação, ele deve ser dotado de um radiador de calor.
Dentre as cargas que este componente pode controlar com precisão, destacam-se: as indutivas, como relés, solenóides e motores de passo.
Além disso, ele pode ser usado como buffer para sinais lógicos.
Os terminais de habilitação deste controle aceitam tanto sinais TTL, como DTL, de modo a facilitar o interfaceamento.
Quando os terminais de habilitação são mantidos no nível baixo, as saídas correspondentes vão ao terceiro estado (Tri-State).
Pinos separados para a alimentação do motor e para o setor lógico são disponíveis, o que facilita a operação com tensões diferentes nos dois setores.
A tensão de alimentação máxima admitida para operação do dispositivo é de 36 V.
Na figura 7 temos uma primeira aplicação no controle de dois motores a partir de níveis lógicos das entradas.

O comportamento obtido para o funcionamento dos motores é dado na tabela I.

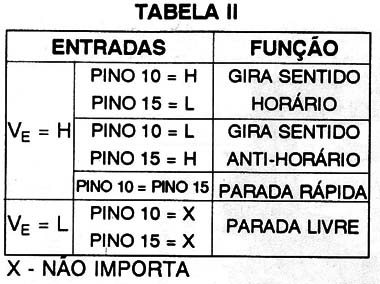
Para um controle bidirecional de um motor, temos o circuito mostrado na figura 8.

A tabela Il mostra o que ocorre com o sentido do motor e sua parada, em função dos sinais aplicados nas entradas.
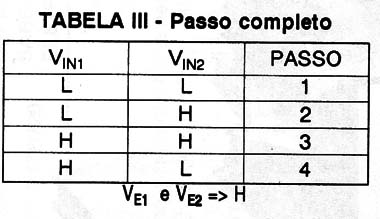
Finalmente, na figura 9 temos a aplicação do LM18293 no controle de um motor de passo bipolar.

Na operação de passo completo, temos 4 posições possíveis que dependem dos sinais de controle, conforme mostra a tabela lIl.
Na operação de meio passo, temos 8 posições possíveis e que também dependem dos sinais de controle, conforme mostra a tabela lV.
CONCLUSÃO
A disponibilidade de componentes específicos para estas aplicações simplifica os projetos e, além disso, permite que sejam obtidos desempenhos à altura das necessidades, por um custo bastante baixo.
O conhecimento da existência de tais componentes é de fundamental importância para os projetistas da área.





