










A finalidade deste artigo é introduzir ao leitor as bases da robótica, mecatrônica e inteligência artificial, descrevendo também os modos segundo os quais podemos realizar projetos a partir de blocos básicos, circuitos e kits. Com o conhecimento do modo de funcionamento de robôs, sistemas automáticos , maquinas inteligentes, o leitor pode criar seus próprios sistemas funcionais para diversas finalidades. Essas finalidades incluem o próprio uso, a apresentação em feiras, como base para cursos de treinamento ou educação tecnológica ou simplesmente para exercício de sua imaginação. Este artigo é escrito com base nos nossos livros Eletrônica Para Mecatrônica, Robotics, Mechatronics and Artificial Inteligence, Mechatronics for the Evil Genius, Bionics for the Evil Genius e Mechatronics Sourcebook.
Robótica, Mecatrônica, Biônica e Inteligência Artificial
Na verdade quando falamos de robótica, mecatrônica, biônica e inteligência artificial é preciso situar muito bem todas estas ciências, pois elas têm tanto semelhanças como diferenças. O que ocorre, é que ao tratar de qualquer uma delas, logo nos vêm à mente o conceito de “criaturas artificiais” ou “criaturas digitais”. Na verdade, quando falamos de mecatrônica, além dos robôs incluímos nesta categoria as automações, máquinas que nada tem de aparência de criaturas, mas que realizam tarefas automáticas que lhes parece indicar alguma inteligência. Por outro lado quando falamos de biônica, vamos para outro lado em que as criaturas humanas interagem de uma forma mais íntima com mecanismos e até têm partes de seus corpos substituídas por mecanismos.
Em seu livro “Digital People” (Gente Digital), Sidney Perkowitz faz uma separação muito firme das diversas categorias de dispositivos ou seres que se enquadram nestes grupos. Assim, partindo de automatismos simples até homens biônicos ou cyborgs temos a seguinte separação que resulta em diferentes graus para a artificialidade dos mecanismos ou seres, se assim podemos falar, lembrando que já existe o conceito de vida artificial.
Assim, com base na separação feita por aquele autor podemos dizer que:
Um automatismo ou um dispositivo mecatrônico é um dispositivo que se move, tem partes eletrônicas e mecânicas, e faz isso sob condições que são fixadas para ele e não por ele. Essa última frase deixa claro que o dispositivo não tem vontade própria.
Por outro lado, um robô é um dispositivo autônomo ou semi-autônomo fabricado para funcionar de modo semelhante a uma entidade viva. Esse dispositivo inclui partes mecânicas, eletrônicas, programas, e tudo mais necessário para que ele alcance sua finalidade. Neste caso, podemos ter os robôs humanóides, que imitam na aparência os seres humanos, e os não humanóides, com formatos que se adaptam às suas finalidades.
Temos a seguir os andróides que são dispositivos feitos para se assemelhar a seres humanos e a se comportar como seres humanos. A própria palavra andróide vem do grego significando “igual ao homem”.
Passamos agora ao Cyborg ou organismo cibernético onde o homem biônico é o melhor exemplo.Trata-se de uma criatura que possui partes dos seres vivos e partes eletrônicas - mecânicas. Em muitos casos, estas partes eletrônicas e mecânicas visam substituir partes vivas que foram danificadas ou que não operam mais num ser vivo. Evidentemente, a parte viva que tem por principal componente o cérebro, comanda as demais...
Em todas estas categorias encontramos variações e mesmo modificações que as tornam membros de grupos intermediários ou totalmente novos. Nesta seção de nosso site vamos ter artigos que incluem todas estas categorias, incluindo projetos práticos. No entanto, para começar vamos tratar inicialmente dos elementos mais simples que estão no grupo dos dispositivos mecatrônicos e dos robôs, que sem dúvidas são os membros mais atraentes. O texto que damos a seguir vem do nosso livro Eletrônica Para Mecatrônica, com adaptações.
Um pouco de história
Os termos Robótica, Mecatrônica, Biônica e Inteligência Artificial se tornaram muito populares nos últimos anos, apesar das definições serem ainda um pouco controvertidas. A idéia de máquinas que possam trabalhar para os humanos, nos livrando de trabalhos desagradáveis ou perigosos, ou seja, escravos ou empregados eletrônicos que não fazem greves ou pedem aumento de salários, tem sido explorada intensamente em filmes e livros de ficção científica.
Podemos citar autores como Hugo Gernsback, Isaac Asimov. Arthur Clarke, além de cineastas como Steve Spielberg, George Lucas e mutos outros que exploraram intensamente esse tema.

R2D3 e C3CPO – Famosos robôs da série Star Wars
Em particular, para os leitores que gostam de eletrônica e dominam o inglês sugerimos as histórias de Hugo Gernsback que se encontram no site http://www.magazineart.org/publishers/gernsback.html. Na figura abaixo, a revista Radio Craft número 1, de julho de 1929, da qual Hugo Gernsback era editor.
Para chegar às origens da robótica, devemos viajar ao passado, até a antiga Grécia, onde as primeiras estátuas móveis foram construídas. Já no primeiro século antes de cristo, Hero de Alexandria fez experimentos com pássaros mecânicos. Em torno de 270 antes de Cristo, temos notícias de um engenheiro grego que construiu relógios de água com figuras móveis.
Bem mais tarde, no ano 770 da nossa era, o relojoeiro Suíço Pierre Jacquet-Droz criou três bonecas mecânicas que podiam tocar um órgão, desenhar figuras simples e escrever. Outro nome, de nossa era, que não pode ser esquecido é o de Nicola Tesla que construiu um submarino rádio controlado.

O submarino radiocontrolado de Tesla (1898)
A palavra Robot foi criada em 1921 pelo escritor Tehecoslovaco Karel Kapec (Encontramos seu nome também grafado como Capec) no seu livro “R.U.R. – Rassum’s Universal Robots”. Nesse livro, ele descreve criaturas mecanizadas que podiam fazer todas as coisas que um homem pode. Robô é a palavra checa que significa “trabalhador”. A partir de então, a palavra passou a ser usada para indicar seres mecânicos que podem fazer trabalhos semelhantes aos humanos.
A imagem popular de um robô normalmente mostra uma criatura com formas e modos que lembram os seres humanos. Os robôs humanóides normalmente possuem braços, pernas e uma cabeça pensante e até mesmo podem expressar “emoções”. No entanto, para os engenheiros e projetistas que trabalham com robôs, a imagem é um pouco diferente.
A idéia básica de um robô prático é substituir os humanos em tarefas repetitivas, perigosas ou cansativas. No nosso mundo atual, essas tarefas estão principalmente ligadas à manufatura de objetos numa linha de produção, o que significa que a primeira idéia de robôs práticos está justamente associada à indústria. Os robôs industriais são justamente os primeiros “seres” reais dessa categoria que entraram no nosso mundo como máquinas operantes, fabricando coisas. Carros, equipamentos eletrônicos e eletrodomésticos são exemplos de coisas fabricadas por máquinas automáticas ou robôs, em substituição aos trabalhadores humanos numa linha de produção.
Um ponto interessante a ser observado é que os robôs industriais, na maioria dos casos, não têm qualquer semelhança com um ser humano, Esses dispositivos não possuem pernas nem uma cabeça mas muitos braços que são projetados para as tarefas que devem realizar. Não há qualquer necessidade de fabricá-los com a aparência de um ser humano.
É claro que a idéia de robôs com aparência humana ou humanóides para outras tarefas, como o trabalho em residências, ou no próprio trato com humanos não desapareceu.
A partir dessas idéias, a associação de dispositivos eletrônicos com mecanismos leva a máquinas que podem realizar uma grande quantidade de tarefas automaticamente. Surge então uma nova ciência denominada Mecatrônica (mecânica + eletrônica).
Encontramos nos dicionários e livros técnicos diversas definições para a mecatrônica. No entanto, a idéia básica é a “integração sinergística da mecânica, eletrônica e tecnologia da computação para produzir produtos ou sistemas avançados”. Podemos dizer que a Mecatrônica é uma subdivisão da Cibernética.
Se levarmos em conta que a mecatrônica e robótica podem ser colocadas em blocos paralelos quando estudamos seus circuitos e duas aplicações, elas têm muito em comum. Assim, analisando o currículo de muitos cursos de mecatrônica, vemos que eles basicamente tratam da construção de robôs. Da mesma forma, quando analisamos os currículos de cursos de robótica, vemos que sua finalidade é a construção de dispositivos que integram a mecânica com a eletrônica!
Outro assunto relacionado com esses estudos é a Inteligência Artificial. Os projetos modernos de robôs e dispositivos mecatrônicos incluem algum grau de inteligência. A questão, entretanto, é qual é o critério que devemos usar para definir inteligência, nesse caso e como determinar que grau de inteligência existe numa máquina.
Diversas são as abordagens utilizadas para resolver esse problema. Por exemplo, o matemático Britânico, Alan Turing, criou um teste muito interessante para saber se uma máquina é ou não inteligente. Ele propôs o uso de uma pessoa para testar a máquina. Homem e máquina são interconectados através de alguma espécie de modem de tal forma que a pessoa não saiba o que está do outro lado da linha. Através desse arranjo, eles podem trocar mensagens, conduzindo uma conversação. Se a máquina puder manter a conversação bem o suficiente para que a pessoa do outro não possa ter certeza se está falando com um humano ou uma máquina, então a máquina pode ser considerada inteligente.
O “teste de Turing” é hoje um parâmetro muito usado para se avaliar se um sistema é ou não inteligente.
Foto - Alan Turing
Hoje em dia quando se pensa em robótica, mecatrônica ou inteligência artificial, diversos itens comuns devem ser considerados. Os projetos nesses campos têm diversas semelhanças, a partir do instante em que todos usam eletrônica e mecânica. (Veja que não estamos considerando o uso de blocos hidráulicos ou pneumáticos por enquanto em nossa seção, mas é algo que deve ser considerado mais adiante).
Isso significa que os mesmos blocos básicos podem ser usados em diversos projetos. Os modos como os blocos são organizados é o único fator que determina o que a máquina vai fazer. No próximo item veremos como blocos podem ser usados em projetos práticos.
A Estrutura dos Projetos Mecatrônicos e Robóticos
Nosso ponto de partida é justamente a idéia de que os dispositivos mecatrônicos e robóticos combinam eletrônica e mecânica e são criados para realizar tarefas normalmente executadas por pessoas. Partindo dessa idéia básica, vamos separar quais são as funções que os blocos devem realizar para se tornarem práticos. Na figura abaixo temos a estrutura geral desses blocos.
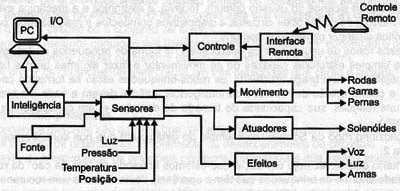
O número e tipo de blocos que devem ser usados num projeto específico é determinado apenas pelo que o projetista deseja que seu equipamento faça. Um braço fixo ou um elevador, por exemplo, não precisam de pernas. Uma cabeça com olhos eletrônicos não precisa de braços e assim por diante. Os principais blocos que podemos usar nos projetos são dados no item seguinte.
Controle
O controle é o “cérebro” ou “inteligência) de qualquer projeto mecatrônico ou robótico. Todas as partes devem ser controladas por circuitos eletrônicos capazes de realizar as seguintes funções básicas:
a)Controle de Posição
Braços com garras ou outros tipos de dispositivos manipuladores precisam ter controles precisos que os coloquem na posição correta para executarem uma tarefa. O movimento de uma cabeça com olhos ou sensores deve ser controlada por um bloco específico.
b)Controle Cinemático
Qualquer projeto que tenha partes móveis precisa desta espécie de controle. A velocidade com que qualquer parte se move precisa ser determinada com precisão e controlada por circuitos apropriados. Neste tipo de bloco incluímos os circuitos que controlam a velocidade de deslocamento de um robô.
c)Controle Dinâmico
Muitas partes de um robô ou dispositivo mecatrônico trabalham com forças que precisam ser controladas de modo preciso durante sua operação. Quando a garra de um robô manipula um objeto é preciso ter alguma espécie de controle que determina a força que ele exerça para segurar mas não quebrar o objeto manipulado. Um desafio para qualquer projetista de um robô ou braço manipulador é fazê-lo pegar ovos e transportá-los de um lugar para outro sem quebrar!
d)Controle Adaptativo
Este tipo de controle é necessário quando uma função de um robô ou dispositivo mecatrônico deve mudar durante a execução de uma tarefa. Um exemplo disso é a mudança de força que uma garra deve exercer ao comprimir uma mola. Outro exemplo é a mudança do torque de um motor de um robô de modo que ele mantenha sua velocidade constante ao subir uma rampa ou quando tenta mover um objeto pesado.
e)Controle Externo
Os controles externos são usados quando um operador humano é usado para comandar as tarefas de um robô ou um braço mecatrônico. Neste caso, o humano é o “cérebro” que faz uso de sensores para controlar as operações do robô.
Para transferir os comandos de um robô ou dispositivo mecatrônico, um operador pode usar uma grande quantidade de “interfaces”. Podemos usar links por rádio, fios, infravermelho ou mesmo através da voz. Os projetos modernos podem incluir circuitos reconhecedores de voz capazes de identificar comandos diretamente falados por um operador.
Neste ponto, é importante considerar o grau de inteligência que deve existir num robô. Os controles complexos podem dar a um observador a falsa impressão de que o robô é “inteligente”. No entanto, um bloco de controle que inclua muitas funções não é um bloco inteligente. É considerada “inteligência” se o robô pode tomar decisões baseadas numa entrada a partir de seus próprios sensores ou de um operador que emprega um bloco específico de entrada de dados.
Atuadores
Os robôs e dispositivos mecatrônicos devem ter alguma forma de manipular objetos ou realizar alguma forma de ação no mundo exterior. Existem basicamente as seguintes formas de atuadores usados nos projetos práticos:
Movimento
Os robôs podem se mover de um lugar para outro usando pernas, rodas ou esteiras. As pernas podem ser movimentas pelo uso de solenóides, motores, SMAs(*), etc.
(*) SMAs ou Shape Memory Alloys - Ligas com Memória de Forma - são materiais que, através de um processo denominado transformação martensítica voltam a uma forma predeterminada quando aquecido. Quando uma SMA está fria (abaixo da temperatura de transformação, ela pode ser deformada facilmente e levada a um novo formato. Quando o material é aquecido acima da temperatura de transformação, altera-se a estrutura cristalina e ele volta ao formato original. Mais adiante, neste mesmo livro veremos como usar as SMAs dando circuitos de controle.
Manipulação
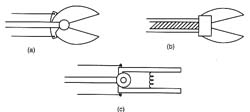
Os robôs e outros dispositivos mecatrônicos não têm mãos. Eles usam garras para manipular os objetos. As garras são controladas por circuitos eletrônicos. Os movimentos das garras podem ser obtidos através de motores, solenóides, SMAs etc. Na figura abaixo mostramos alguns tipos de mecanismos usados em garras.
A manipulação também pode ser obtida pelo uso de dispositivos especialmente projetados para uma determinada tarefa, como ocorre com os robôs industriais. As partes são então projetadas de acordo com a operação a ser realizada, uma chave de fendas em lugar de garras para colocar parafusos, etc.
Sensores
Os robôs e outros dispositivos mecatrônicos se interam do que ocorre no mundo exterior através de sensores. Os sensores são de grande importância já que eles podem transmitir informações sobre as posições das diversas partes de um robô ou outro dispositivo, o tamanho e forma de um objeto que está sendo manipulado, a presença de obstáculo (se for um robô móvel), além de muitas outras informações que dependem apenas da finalidade do projeto.
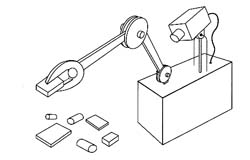
Uma câmera de TV pode ser conectada a um circuito inteligente que permita a um braço reconhecer e selecionar peças que tenham determinada forma e tamanho, selecionando-as numa linha de montagem, conforme mostra a figura abaixo.
Os sensores mais comuns nos projetos de mecatrônica e robótica são:
Luz – LDRs (Light Dependent Resistors, células CdS ou Foto-Resistores), foto-diodos, foto-transistores e foto-células.
Pressão – esponja condutora, sensores eletromecânicos, sensores semicondutores.
Temperatura – NTC (Negative Temperature Coefficient Resistors), PTC (Positive Temperature Coefficient Resistors), diodes e transistores.
Imagem – CCDs (Charge-Coupled Devices), foto-diodos e foto-transistores e matrizes]
Posição – sensores lineares e rotativos, encoders, sonares, radares e sensores IR
Contacto – microswitches, pendulos
Proximidade – capacitivos, indutvos ou infravermelhos, efeito hall.
Energia
Projetos que tenham dispositivos eletrônicos e partes mecânicas móveis precisam de uma fonte de energia elétrica. Se o projeto é um robô autônomo, por exemplo, o ideal é que ele carregue sua própria fonte de energia. Baterias e pilhas podem ser usadas para essa finalidade. O tamanho e tipo de fonte, neste caso, depende das exigências de energia do projeto e do tempo que ele deve operar sem uma troca ou recarga.
Se o equipamento é fixo, por exemplo um braço robótico ou um elevador, a energia elétrica pode ser proporcionada por uma fonte a partir da rede de energia. Circuitos retificadores, filtros e reguladores fazem parte desse tipo de bloco. É claro que, dependendo do projeto, podemos pensar em fontes alternativas de energia como painéis solares, motores a combustão interna, células à combustível e muito mais.
Inteligência
Eis um bloco importante que pode ser encontrado em muitos projetos de mecatrônica e robótica.
Os blocos de inteligência processam informações que são obtidas a partir de sensores ou recebidas de outras fontes externas (computador ou operador humano) tomando decisões a partir delas sobre o que o sistema deve fazer. O bloco de inteligência pode ser simples como um comparador neural que percebe a intensidade de uma fonte de luz e faz com que um robô vá em sua direção. Pode também ser muito complexo, envolvendo microprocessadores, redes neurais e outros recursos para tomar decisões de alto nível.
Inteligência por Software
Esse tipo de inteligência é obtida a partir de um programa que reside num computador, microprocessador ou microcontrolador. O hardware se encarrega de converter as informações obtidas de sensores para que o programa as processe e tome as decisões que, novamente pelo hardware, resultem nos comandos para a realização das tarefas decididas.
Nos programas inteligentes, as decisões podem ser modificadas à medida que novos dados são obtidos dos sensores, o que torna o sistema capaz de “aprender” com a experiência. Essa é uma característica básica dos sistemas denominados inteligentes.
Os programas que simulam redes neurais são os preferidos pelos desenvolvedores e pesquisadores de inteligência artificial. Outra ferramenta poderosa para o desenvolvimento desses sistemas é a lógica Fuzzy ou Lógica Difusa.
É importante notar que a inteligência por software pode ser localizada no interior do próprio dispositivo mecatrônico ou robô quando usamos microprocessadores ou microcontroladores. Os dispositivos Basic Stamp, Basic Step, Arduino, etc. são recursos simples que podem ser usados para se adicionar algum grau de inteligente à projetos simples. Eles podem ser programados para tomar algumas decisões a partir de “inputs” obtidos de sensores externos de controle.
Diversos programas de simulação de redes neurais existem para o desenvolvedor criar sua própria máquina inteligente.
Inteligência por Hardware
Uma outra forma de se agregar inteligência a uma máquina é através do uso de circuitos que podem aprender. A idéia básica é imitar o modo como os seres vivos processam as informações recebidas pelos sensores, ou seja, usando o sistema nervoso. Uma analogia é mostrada na figura 4.
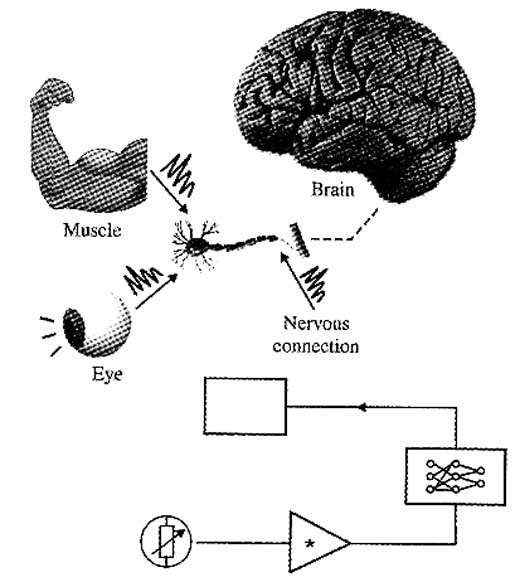
Os seres vivos recebem informações do mundo exterior por sensores acoplados à célula nervosa. As células enviam a informação ao cérebro, formado por uma rede de células. No cérebro, as informações são processadas e o resultado, é enviado por uma outra rede de células aos efetores, por exemplo, os músculos.
Usando neurônios artificiais, o projetista pode juntar elementos numa rede que imita o funcionamento de um ser vivo, agregando assim inteligência a um mecanismo ou um robô.
É claro que um simples neurônio não pode levar a um comportamento realmente inteligente. Obtemos o comportamento de uma ameba. Mesmo usando muitos milhões de neurônios o comportamento obtido não vai muito além do que observamos num verme ou num inseto.
Uma rede neural pode aprender e tomar decisões, dando a uma máquina algum grau de inteligência. Existem à venda CIs que já contém redes neurais e que podem ser usados em projetos.
Efeitos Especiais
Dependendo da aplicação, o robô ou o dispositivo mecatrônico deve possuir algum recurso capaz de chamar a atenção das pessoas. Nos projetos práticos devemos considerar a possibilidade de incluir blocos que produzam sons, falem algumas palavras ou frases, respondam questões, produzam efeitos de luz ou mesmo levem equipamentos de auto-defesa.
Basicamente são os seguintes os efeitos que podem ser incluídos num projeto mecatrônico ou robô:
Sons: sirenes, sistemas sintetizadores de voz, batida de coração e respiração (existem bonecas que incluem esses efeitos para se obter maior realismo).
Efeitos de luz: flashes de xenônio, luzes seqüenciais, sinalização simples, etc.
Auto-defesa: descargas de alta tensão
Usando os Blocos Básicos em projetos
Como explicamos na introdução, a idéia básica do nosso trabalho é descrever blocos eletrônicos de construção básicos que possam ter uma das diversas funções necessárias à implementação de um projeto de robótica ou mecatrônica. Entendendo como funciona cada bloco básico e o modo como podem ser interligados entre si, o leitor poderá compreender como funcionam sistemas inteiros projetando-os para realizar um determinado tipo de tarefa.
Conforme dissemos também, o número e a complexidade dos blocos depende exclusivamente da tarefa que o dispositivo deve executar. Para usar os blocos básicos, o desenvolvedor deve ter em mente alguns pontos importantes:
Conectividade:
Os blocos devem ser projetados de tal forma que eles possam ser interligados facilmente. Isso significa que o sinal fornecido pela saída de um bloco deve ser compatível com as características de entrada do bloco no qual ele deve ser acoplado. Os blocos que descrevemos nesse livro, em sua maioria podem “conversar” uns com os outros, mas existem casos em que pequenas adaptações ou “interfaces” devem ser usadas, consistindo essas em blocos adicionais do projeto.
Compatibilidade
O desenvolvedor de projetos de robótica e mecatrônica deve estar atento para o fato de que, ao escolher um bloco para uma tarefa, deve estar certo de que ele seja capaz disso. Um bloco que tenha sido projetado para controlar um motor de 0,5 ampères não pode ser usado com um motor que exige 2 A.
Potência Exigida
Se o projeto for alimentado por baterias ou pilhas é muito importante que o desenvolvedor verifique se elas podem fornecer pelo tempo desejado a energia que ele precisa. Motores, atuadores, solenóides e lâmpadas são os responsáveis pela maior parte do consumo de um equipamento. Um alto consumo de energia provoca uma queda de tensão no circuito de alimentação com alterações do funcionamento de todos os blocos. É altamente recomendável que dispositivos de alto consumo, como os usados na propulsão e movimento (motores, garras, etc.) sejam alimentados por fontes independentes daquelas usadas na alimentação nos blocos eletrônicos.
Se o dispositivo for alimentado pela rede de energia, as mesmas recomendações são válidas. Use uma fonte com capacidade suficiente para alimentar todos os blocos e preferivelmente fontes separadas para motores e atuadores.
Projetos Sugeridos
Chegamos ao ponto em que o desenvolvedor está pronto para criar seus próprios projetos usando blocos básicos.
Usando os blocos básicos mostrados o leitor pode criar dispositivos mecatrônicos e robôs que funcionam. Diversas sugestões de projetos serão dados a seguir de forma completa ou em blocos nesta seção do site.
Braço Móvel ou Braço Robótico
Este é um dos projetos preferidos pelos praticantes de robótica e mecatrônica, estando presente na maioria dos currículos de escolas técnicas. Um braço robótico pode pegar um objetos e colocá-los em outro lugar, por exemplo numa caixa ou numa esteira.
Um braço robótico básico deve conter as seguintes funções:
Controle – obtendo informações de movimento a partir de um teclado, joystick ou mesmo de um computador (pelo teclado ou mouse).
Atuador – para movimentar o braço e a garra. Uma alternativa para a garra num projeto mais simples é usar um eletroímã, se os objetos a serem movimentados forem de metal que pode ser atraído.
Sensores – podemos usá-los opcionalmente para enviar informações ao operador, por exemplo quando o local onde os objetos forem colocados estiver cheio ou se o objeto cai antes de ser colocado no seu lugar.
Fonte de alimentação
Efeitos – também podemos ter opcionalmente efeitos de luz e som, ou mesmo um contador de objetos.
Robô Caminhante ou Autônomo
Este é, sem dúvida alguma, um dos mais interessantes projetos de mecatrônica que podemos desenvolver, tanto pelos efeitos finais como pela quantidade de recursos que podemos agregar. Um robô caminhante ou autônomo pode ser tão simples que apenas caminha ou tão completo que possua inteligência, órgãos sensoriais e seja capaz de realizar diversas tarefas.
Controle – Os sinais deste bloco podem ser enviados pelo operador (via rádio controle, infravermelho ou cabo), ou podem ser gerados por sensores acoplados às partes móveis (motor, garras, braço, etc.). Se o robô tiver outras partes móveis, elas podem também ser controladas por este bloco.
Cérebro – alguma inteligência pode ser agregada ao operador para ajudar os sensores. O robô poderá então tomar algumas decisões independentemente da ação do operador.
Sensores – os sensores informarão o operador ou o circuito de inteligência sobre a presença de obstáculos ou outras condições detectáveis de modo que decisões possam ser tomadas.
Atuadores – se o robô for dotado de garras ou outros recursos, devem existir blocos de controle de atuadores. Uma idéia é uma mão artificial adaptada.
Efeitos – efeitos de luz e som podem ser adicionados. Efeitos são importantes quando o robô participa de eventos ou demonstrações públicas e feiras de ciências.
Alimentação – esse tipo de robô deve ser alimentado por baterias.
Robo Segue-a-Linha
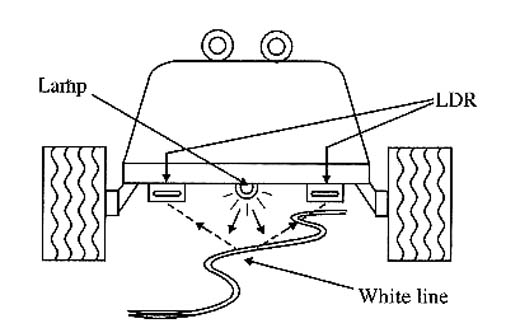
Um projeto clássico que é adotado, pela sua simplicidade, na maioria dos cursos básicos de mecatrônica e robótica é o do robô que segue uma linha no chão. Esse robô é equipado com sensores de luz (LDRs ou foto-transistores) que são ligados num sistema diferencial inteligente capaz de controlar seu movimento.
Existem duas possibilidade de funcionamento: os sensores podem ser excitados pela luz refletida numa linha preta em fundo branco ou por uma linha branca em fundo preto. Basta mudar a configuração dos blocos para detectar luz ou sombra. Pela detecção dessa linha, o robô pode dirigir seus movimentos de modo a seguir a linha., conforme mostra a figura abaixo.
Na versão mais simples a linha forma um circuito fechado no qual o robô ficará se movimentando.
Os blocos básicos deste robô são:
Sensores – a solução mais simples para implementação de sensores de luz é a que faz uso de LDRs. No entanto, foto-transistores também proporcionam excelente desempenho.
Controle – Esse bloco é acionado diretamente a partir dos sinais dos sensores.
Alimentação – dependendo do tamanho do robô podem ser usadas pilhas, mas para um robô mais elaborado podem ser usadas baterias recarregáveis.
Efeitos – luz, sirenes ou estroboscópicas de sinalização podem fazer parte deste projeto.
Elevador Automático
Este também é um outro projeto clássico nos cursos de mecatrônica, robótica e automação industrial. Conforme mostra a figura 6, a versão básica é implementada numa maquete de construção. O número de andares depende apenas do projetista.

A finalidade do projeto é a operação automática do elevador, usando sensores em cada andar. Pode ser usado um teclado para controlar o movimento ou ainda um circuito inteligente para tomar decisões. Esse bloco pode ser usado para decidir em que andares o elevador vai parar a partir do acionamento de botões de chamada e da posição em que ele se encontra.
Criando seu Próprio Projeto
Um ponto importante para quem desenvolve um projeto de mecatrônica ou robótica é agregar criatividade. Se o leitor vai participar de uma feira, pretende montar um equipamento para um trabalho escolar ou concurso, vai desenvolver um TCC ou monografia baseado num projeto prático mecatrônico, é importante que ele tenha algum diferencial, algo que outros projetos não agreguem e que lhe vai dar mais pontos. Algumas idéias de projetos são dadas a seguir:
Linha de produção ou reciclagem em miniatura que manipule objetos.
Braço robótico que possa reconhecer peças separando-as pelo formato, cor ou peso. Um eletroímã permite reconhecer e separar objetos que possam ser atraídos.
Robô que siga a luz de uma lanterna ou encontre um objeto iluminado
Modelo em miniatura de um “lava-rápido”
Cabeça de robô que possa falar palavras ou reconhecer objetos e movimente a boca (este tipo de dispositivo também se enquadra na categoria dos “animatrônicos”.
Sistema automático para alimentação de animais
Dispositivos que ajudem deficientes físicos
Automatismos para o lar como portões automáticos, irrigadores inteligentes, robôs cortadores de grama ou “caçadores” de pragas, etc.
Automatismos médicos como cadeiras de rodas, cama hospitalares, etc. com recursos diferenciados.
Também devemos lembrar que muitos construtores de robôs participam de competições que envolvem determinadas tarefas como jogar futebol, participar de batalhas, movimentar objetos de modo preciso, etc. Na Internet o leitor vai encontrar diversos sites que tratam de robótica, bastando digitar as palavras chave em português ou em inglês em mecanismos de busca como o Google, Yahoo, Netscape, etc. O leitor vai ficar surpreso com a quantidade de informações que pode ser obtida nos sites.
Informação Adicional
Este nosso artigo introdutório à robótica e mecatrônica visa fornecer apenas conceitos básicos para a elaboração de projetos até de alguma complexidade. Para utilizar os blocos fornecidos aqui o leitor precisa ter conhecimentos básicos de eletrônica e também as ferramentas e local apropriado para o seu trabalho. A seguir, damos algumas informações importantes para que o leitor não tenha dificuldades com a criação de seus próprios projetos.
Conhecimento Básico de Eletrônica
Muitos desenvolvedores de projetos em mecatrônica e robótica não possuem uma base sólida em eletrônica pois podem vir de outras áreas como a mecânica, física, etc. Não é preciso ser um doutor ou engenheiro em eletrônica para desenvolver projetos mecatrônicos e robóticos. Lembramos que muitos dos bons projetos desta área são desenvolvidos por estudantes do ensino médio e de cursos técnicos que não aprofundam-se muito na eletrônica.
Para trabalhar com circuitos eletrônicos montando-os com facilidade, o leitor precisa ter alguma habilidade no trato de ferramentas e ter alguns conhecimentos básicos sobre os seguintes assuntos:
Saber como os componentes básicos funcionam e conhecer seus códigos de especificações.
Saber interpretar um diagrama esquemático
Conhecer técnicas de elaboração de placas de circuito impresso e ter recursos para isso.
Ter e saber usar alguns instrumentos básicos de medida e teste como um multímetro.
Ter um bom fornecedor de componentes eletrônicos.
Existem muitos livros básicos que podem ajudar o leitor a aprimorar seus conhecimentos nesta área ou mesmo dotá-lo caso ele não os tenha adquirido em sua formação normal. Sugerimos a aquisição de nosso “Curso Básico de Eletrônica”- Editora Saber para os que desejam ter os fundamentos necessários à montagem de circuitos eletrônicos. Para os que têm conhecimentos básicos e deseja ir além, sugerimos nosso “Curso de Eletrônica Digital”. Muitas idéias de circuitos práticos são também encontradas na série de livros “Circuitos e Soluções” – Volumes de 1 a 5. Finalmente temos o livro que basicamente é a continuação deste artigo : “Eletrônica Básica para Mecatrônica”.
Ferramentas
As ferramentas básicas que os leitores devem ter para realizar montagens eletrônicas são:
Ferro de soldar de pequena potência (30 a 40 W) com alimentação conforme sua rede de energia. Não recomendamos o uso de pistola de soldar.
Alicate de corte lateral
Alicate de ponta
Descascador de fios
Jogo de pequenas chaves de precisão (hexagonal, comum e Philips)
Acessórios de soldagem e dessoldagem como sugador de solda, suporte de placas, etc.
Garras extra para segurar componentes
Furadeira de placa (manual ou elétrica)
Recursos para elaboração de placas de circuito impresso (corrosivo, banheira, tinta especial, etc.).
Instrumentos
Multímetro analógico simples (1 k ohms/V) para estudantes. Para os mais avançados multímetros mais sensíveis (10 k ohms/V ou mais são os recomendados)
Multímetro digital para os que desejam ir além tendo uma ferramenta de precisão.
Osciloscópio – apenas para aquelas que desejam um trabalho muito avançado no desenvolvimento de projetos.
Computador – tanto para controlar dispositivos desenvolvidos como para rodar ferramentas de desenvolvimento de projetos como softwares de criação e simulação de circuitos e placas (Multisim, Proteus, Protel, Eagle, PCB123, etc.). Também é possível contar com placas de aquisição de dados que permitem usar o computador como osciloscópio, multímetro, etc.





