










 Projetar robôs sem usar cálculos é igual a ir a um lugar onde você nunca foi sem usar mapas ou perguntar a alguém como chegar, ou seja, se acertar na primeira será por acaso.
Projetar robôs sem usar cálculos é igual a ir a um lugar onde você nunca foi sem usar mapas ou perguntar a alguém como chegar, ou seja, se acertar na primeira será por acaso.
Pode parecer massante aprender trigonometria, principalmente quando nos ensinam diversas fórmulas para que apenas possamos memorizá-las para um dia aplicarmos na prova do vestibular. Dependendo do que escolhemos como profissão isso pode até ser útil, mas para quem deseja ingressar na área tecnológica, os cálculos são o alicerce de qualquer projeto, mesmo para uma simples regra de três, os cálculos são necessários.
Veremos nas linhas seguintes algumas aplicações e como chegar a aquela conclusão, não só aplicando os teoremas mas entendendo-os.
Caso 1: Movendo um braço robótico com aplicação do teorema de Pitágoras.
Imagine o seguinte: Você tem um braço robótico, mas o seu acionamento é feito com eixo de rosca sem fim, conforme mostra o desenho da figura 1. Note que a dobra do braço mecânico, a haste que puxa o braço, e o eixo da rosca sem fim formam um triângulo, e quando totalmente puxado trata-se de um triângulo retângulo (um dos ângulos tem 90°).

Sabemos que da dobra do braço até o parafuso temos 1 cm, e o eixo da rosca sem fim tem 1 cm no seu limite final. Porém uma dúvida fica no ar, qual será o tamanho da haste que irá puxar o braço mecânico?
Segundo Pitágoras, a soma dos catetos elevados ao quadradro é igual à hipotenusa elevada também ao quadrado. Até aqui são fórmulas aplicadas, mas como ele chegou a esta conclusão?
Para sabermos como ele pode ter descoberto esta fórmula vamos fazer o seguinte: seguindo a ideia da figura 2, temos um triângulo retângulo, onde supostamente Pitágoras, por algum motivo, precisou descobrir a medida de um dos lados de um triângulo, então nada melhor de que trabalharmos em um triângulo de exemplo.
Ele chegou à conclusão que se multiplicasse um dos lados do triângulo por ele mesmo teria uma área quadrada (por isso elevar ao quadrado). Depois ele fez isso com os outros dois lados, foi aí que ele somou os dois lados que ficam unidos pelo ângulo de 90 graus e notou que o resultado obtido era igual ao lado oposto ao ângulo de 90 graus. Para simplificar ainda mais as coisas, ele resolveu chamar as retas que se uniam ao ângulo de 90 graus de catetos, e o lado oposto de hipotenusa. Colocando o seu raciocínio em uma fórmula, Pitagoras descreveu: a = hipotenusa, b = cateto e c = cateto, logo a2 = b2 + c2.
Esta lógica pode ser notada na figura 2, onde temos a distribuição feita em quadrados, as laterais do triângulo são elevadas ao quadrado e depois comparadas, os catetos com a hipotenusa.
Agora fica fácil resolver o nosso problema do braço robótico, vemos que a dobra do braço cria um ângulo de 90 graus quando totalmente puxado, se ele tem a distância de 1 cm da dobra até o parafuso de fixação e de 1 cm da dobra até o término da rosca sem fim, vamos descobrir a haste (hipotenusa), aplicando a fórmula:
Haste2 = braço2 + rosca sem fim2
Trocando pelos números temos:
Haste2 = 12 + 12
Haste2 = 1 + 1
Haste = ?2
E agora Pitágoras? Haste multiplicado pela Haste não é igual a 2?
Os gregos na época de Pitágoras não conheciam a Raiz Quadrada, então eles diziam que a Haste precisaria ter um valor onde um número multiplicado por ele mesmo deveria ser igual a 2. Nós da sociedade moderna conhecemos a raiz quadrada, mas na época de Pitágoras os cálculos eram feitos passo a passo, o que explicaremos em outra oportunidade. Por enquanto vamos utilizar a calculadora, onde temos o resultado de Haste ± 1,41.
Caso 2: Calculando a trajetória do robô usando Seno, Cosseno e Tangente
Imagine um robô que tenha em sua central de processamento um programa que controla os motores e servomotores; conforme o mapa configurado em sua memória ele faz a sua trajetória, porém um obstáculo ou uma mudança de planos faz com que ele mude o destino final. Quantos graus o robô terá que mudar a sua trajetória para alcançar o destino B ao invés do A, sendo que o ponto B está à mesma distância que o ponto A?
Na figura 3 temos uma ilustração que mostra bem essa cena, note que o robô estava indo para o ponto A quando, por algum motivo ele teve que refazer a rota para o ponto B. Para isso temos que mandar o servo rotacionar tantos graus para que o robô tome a direção correta até o ponto B, mas quantos graus?

Para fazer este cálculo precisamos coletar os dados necessários para resolvermos a questão. O primeiro é saber a distância entre o ponto onde está o robô e o ponto A, a segunda informação seria a distância entre o ponto A e o ponto B, ou do ponto onde o robô se encontra até o ponto B. Vamos partir do princípio que temos a distância entre o ponto A e o ponto B. Então temos os seguintes dados:
• Distância entre o PA (ponto atual) e o ponto A = 1 m.
• Distância entre o ponto A até o ponto B = 1 m.
Para auxiliar no cálculo, traçamos uma reta perpendicular à distância do ponto A e o B, de forma que tenhamos dois triângulos retângulos (com um dos ângulos de 90 graus). Vamos dar atenção à reta até o ponto A, pois sabemos a distância: como a reta perpendicular passou no meio da distância entre o ponto A e B, que sabemos ter 1 m de distância, temos 50 cm na reta oposta ao ângulo que estamos querendo descobrir.
Só pelo fato de sabermos duas das medidas do triângulo podemos aplicar a teoria de Pitágoras, onde a distância do ponto atual ao ponto A é a hipotenusa; a distância do ponto A ao ponto D é o cateto, que está no oposto do ângulo que precisamos descobrir; a reta perpendicular, do ponto atual ao ponto D é o cateto adjacente ao ângulo.
Logo:
12 = 0,52 + Cateto Adjacente2
1 = 0,25 + Cateto Adjacente2
1 – 0,25 = Cateto Adjacente2
0,75 = Cateto Adjacente2
Cateto Adjacente = ?0,75
Cateto Adjacente = 0,86
Descobrimos aqui a distância entre o ponto atual e o ponto D, mas pra que serve isso? Fica mais fácil de acharmos o ângulo baseado num triangulo retângulo (figura 4).

Com todas as medidas em mãos, poderemos achar os graus correspondentes aplicando de forma correta os cálculos do seno, cosseno e tangente.
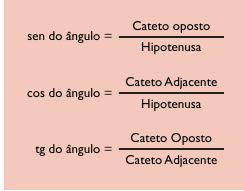
Para se achar o seno de um determinado ângulo só precisamos dividir o cateto oposto pela hipotenusa, o cosseno é só dividir o cateto adjacente pela hipotenusa, e finalmente, achar a tangente de um determinado ângulo é só dividir o cateto oposto pelo cateto adjacente.
Tomando o nosso exemplo vamos achar o seno de a/2, onde o cateto oposto (0,5) precisa ser dividido pela hipotenusa (1), logo temos 0,5. Se calcularmos a tangente deste mesmo ângulo, temos que dividir o cateto oposto (0,5) pelo cateto adjacente (0,86), logo temos um valor aproximado de 0,58, que teremos o mesmo resultado na tabela abaixo.

Seria importante para aprimorar os seus conhecimentos, aplicar estes mesmos cálculos aos demais ângulos, mesmo que você saiba o resultado.
Independentemente do formato do triângulo, a soma dos ângulos internos não pode ser diferente de 180 graus. Para acharmos quantos graus temos neste triângulo precisamos consultar a tabela 1, onde temos todos os cálculos de seno, cosseno e tangente, baseados nas suas medidas. Existem fórmulas para encontrarmos estes valores, mas por enquanto é necessário entendermos como achamos os graus correspondentes.
Para o nosso caso, temos o seno do ângulo a/2 que é de 0,5 e o cosseno que é de 0,86, aí é só procurar na tabela 1 os valores corretos e verificarmos que o ângulo a/2 tem 30 graus. Logo temos um ângulo de 30 graus, outro de 60 graus e o ângulo reto de 90 graus, se somarmos todos eles temos 180 graus.
Agora que temos o valor em graus de um dos triângulos, pois tivemos que dividir o mesmo para obtermos um triângulo retângulo, é só multiplicar por dois e teremos os graus necessários para rotacionar o servo, que é de a= 60 graus.
Conclusão
Certamente o leitor encontrará situações bem mais difíceis do que esta apresentada no artigo, onde utilizamos medidas de 1 cm para facilitar os cálculos, mas ele poderá alterar os valores e ver se realmente acertou no seu cálculo, de preferência utilizando uma régua e traçando rotas sobre a mesa e vendo se conferem as medidas feitas com os resultados dos cálculos. Com dedicação e prática você poderá até resolver situações como estas só vendo os dados sem fazer os cálculos, isso significa que você estará desenvolvendo em sua mente a memória virtual, muito útil para o técnico de automação e mecatrônica.





