










Um dos complementos de maior importância nos projetos que fazem uso de microcontroladores e motores é o shield de acionamento de motor. Esta interface utiliza os sinais de menor intensidade disponíveis na saída de um microcontrolador para acionar cargas de maior potência, no caso os motores. Neste artigo temos uma coletânea de projetos simples de shields que você pode montar com componentes comuns.
Da mesma forma que uma variedade muito grande de microcontroladores se encontra para venda na internet e outras fontes, os shields dos mais diversos tipos também estão disponíveis e dentre eles, os shields de acionamento de motores.
Estas pequenas placas contém os elementos para processar os níveis lógicos de saídas lógicas de um microcontrolador, aumentando sua intensidade de modo a permitir o acionamento de motores dos mais diversos tipos. São motores DC, motores de passo e mesmo sem escovas.

No entanto, na falta de uma delas, ou se o leitor deseja simplesmente fazer testes usando componentes comuns, antes de partir para uma solução comercial, existem diversas alternativas que podem ser montadas em ponto tempo numa matriz de contato. Selecionamos algumas delas. No site, muitas outras podem ser encontradas tanto na seção Banco de Circuitos (CIR) como na seção de mecatrônica (MEC).
O que deve ser observado
Mesmo que tentemos controlar um pequeno motor, dentro das especificações das saídas de um microcontrolador, precisamos tomar precauções adicionais para que tudo funcione corretamente.
Os motores de corrente contínua (CC ou DC) possuem escovas que geram transientes que podem afetar o próprio circuito de controle (microcontrolador) e, além disso, mudam de consumo conforme a carga.
Sob carga intensa a sua corrente aumenta facilmente para além da capacidade de fornecimento de um microcontrolador e isso pode significar sobrecargas tanto para o microcontrolador como para sua fonte.
Para usar circuitos adicionais (shields) que possam excitar motores DC a partir da saída de circuitos lógicos digitais ou microcontroladores devemos levar em conta os seguintes fatos:
a) O motor não precisa ser necessariamente alimentado pela mesma fonte de controle ou microcontrolador. Pode ser usado um motor de tensão maior desde que a etapa de saída do circuito esteja de acordo com ele e a etapa de entrada de acordo com a lógica de controle. Podemos controlar um motor de 12 V a partir da lógica de 5 V da saída de um Arduino.
b) A corrente do shield deve estar de acordo com o exigido pelo motor. Para os casos de motores de alto consumo ou ruidosos é interessante usar fonte separada para o shield.
c) Deve-se considerar com o motor é uma carga fortemente indutiva. O shield deve prover isso com os componentes de proteção, normalmente um diodo em paralelo com o motor.
d) O aterramento comum do shield e do microcontrolador deve ser bem-feito para que não sirva de percurso de realimente para transientes que possam afetar seu funcionamento.
1. Breakout board para reversão de motor DC
Para inverter a rotação de um motor com a troca de níveis de uma saída de um Arduino ou outro microcontrolador podemos usar um relé de 5 V conforme ligação mostrada abaixo. O motor tem alimentação independente. Para ligar e desligar o motor podemos usar um segundo relé. Para relés de maior tensão é conveniente usar uma etapa de excitação. circuito.

2. Controle de movimento para motores DC
Um pouco mais complexo que o anterior, já podendo ser chamado de shield, este circuito pode ser usado no controle de movimento de um robô, atuando sobre o motor. Dois motores devem ser usados em controles semelhantes, havendo duas entradas lógicas de controle. O circuito pode ser facilmente adaptado para operar como um shield de microcontrolador utilizando-se relés sensíveis de 5 V.

3. Shield isolado para Motores ou Relés
Para controlar relés ou motores DC de forma segura com um duplo isolamento pela porta paralela, sugerimos o circuito da figura. O isolador óptico isola o circuito do microprocessador ou do PC do circuito de acionamento dos relés, que pode operar com tensão diferente de 5 V. Na verdade, com o uso de relés de 12 V é possível obter melhor desempenho. Os relés de 12 V são mais fáceis de obter, mais sensíveis e com isso podem facilitar a montagem da interface. O resistor R1 deve ter seu valor escolhido de acordo com o tipo de acoplador óptico empregado de modo a se obter o ponto ideal de disparo com o sinal da porta no nível alto. Uma possibilidade para se encontrar o melhor valor, consiste em se usar no desenvolvimento do projeto um trimpot e depois substituí-lo por um resistor fixo. Levando em conta que os relés de 12 V comuns são especificados para uma corrente de 50 mA, a fonte deve ser dimensionada prevendo-se os instantes em que todos eles estejam acionados. Assim, para uma interface em que as 8 saídas da porta paralela sejam usadas, a fonte deve ser capaz de fornecer os 400 mA exigidos.

4. Driver Para Motor DC
Este circuito pode servir de base para o projeto de pequenos robôs controlados por microcontroladores (shield de potência sem relé). O circuito pode controlar motores até 500 mA e com a troca dos transistores motores de potências maiores.
O circuito descrito pode ter as etapas lógicas alimentadas por 23,3 ou 5 V e a etapa de potência do motor com tensões maiores a partir de 5 V conforme o motor. Usando o TIP31 e TIP32 nas etapas de saída os motores podem chegar aos 2 A. Estes transistores devem ser dotados de dissipadores de calor.
Na tabela abaixo temos as condições dos motores em função dos sinais de entrada.
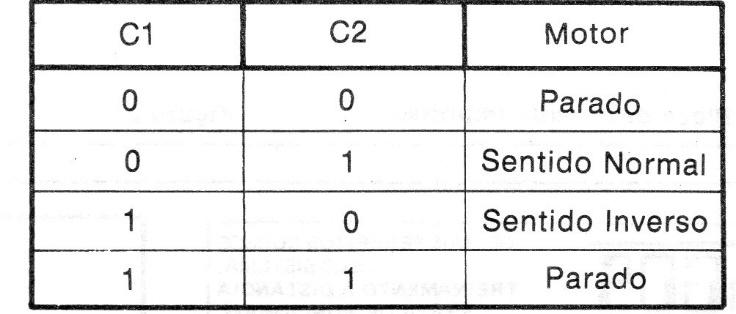
O diagrama completo do controle é mostrado na figura 5.

Uma placa de circuito impresso para a montagem é sugerida na figura 6.

O capacitor em paralelo com o motor eventualmente deve ser aumentado se for notada instabilidade de funcionamento devido ao ruído das escovas
5. Interface Simples TTL
Este circuito pode ser usado como uma interface de saída para computadores pessoais que tenham a porta paralela (antigos) e também como shield para microcontroladores com as devidas adaptações. Os componentes usados são comuns.
Este circuito de shield ou interface pode ser usado com diversas finalidades para controlar o fluxo de dados entre um microcontrolador ou computador e um circuito controlado. A alimentação deve ser feita com tensão de 5 V e as saídas devem levar em conta a capacidade de corrente disponível, acionando eventualmente etapas de potência.
O diagrama completo da interface é dado na figura 7.

A placa de circuito impresso é mostrada na figura 8.

Na montagem devem ser observadas as posições dos circuitos integrados e as trilhas devem ser cuidadosamente verificadas para que não ocorram curtos.
6. Shield de Controle Bidirecional de Motor DC
O circuito mostrado na figura 8 é uma "meia ponte H" e sua finalidade é controlar o sentido de rotação de um motor de corrente contínua a partir da polaridade do sinal de entrada.
Com um sinal positivo o motor gira no sentido direto. Com um sinal negativo no sentido inverso. Sem sinal ou com uma tensão de 0 V o motor estará parado. Motores de até 2 A com tensões na faixa de 6 a 15 V de alimentação podem ser controlados por este circuito.

Utilidades:
• Controle lógico de motores em automatismos e projetos de mecatrônica a partir de sensores ligados à comparadores de tensão.
• Interfaceamento de motores com computadores usando circuito intermediário apropriado.
• Inversão do sentido de circulação em automatismos de corrente contínua como, por exemplo, solenoides.
• Controle de sentido de movimento em robôs e outros dispositivos móveis usando chaves como sensores.
• Implementação de controles PWM aplicando pulsos de frequência e polaridade apropriada, conforme sentido e velocidade desejada para os motores.
Detalhes Construtivos:
Os transistores de potência admitem equivalentes conforme a corrente do motor ou outra carga controlada. Esses transistores devem ser dotados de dissipadores de calor.
O circuito precisa de uma corrente de entrada de pelo menos 5 mA para acionamento de um motor de 500 mA com transistores de ganho 100.
Isso significa uma tensão da ordem de pelo menos 5 V na entrada, com polaridade que dependerá do sentido de rotação desejado.
Ganhos maiores podem ser obtidos com transistores Darlington de potência.
Na figura 10 temos uma sugestão de placa de circuito impresso, se bem que a configuração possa ser implementada na própria placa que contém o circuito completo de controle.

7. Shield experimental de motor de passo
Este circuito experimental para movimentar um motor de passo foi encontrado numa documentação de 2002. No entanto, dada a sensibilidade dos TIP31, a excitação pode ser feita com tensões a partir de 3 V o que permite usá-lo como shield para microcontroladores. Aplicando a sequência correta de pulsos nas entradas podemos movimentar o motor de muitas formas.

8. Shield padrão para motor de passo usando transistores NPN
Este circuito foi adaptado do meu livro Robótica, Mecatrônica e Inteligência Artificial - Robotics, Mechatronics and Artificial Intelligence (esgotado) publicado nos Estados Unidos. Ele pode ser usado como um escudo de controle para motores de passo em um projeto de mecatrônica ou robótica ou como um bloco de construção para projetos simples.
O shield mostrado na Figura 12 é um driver para o controle de motor de passo até 1 A. É apropriado para esta corrente se os transistores forem BD135 / BD17 ou BD139.

A sequência de pulsos para posicionar o motor é aplicada às entradas P1 a P4 para um tradutor apropriado (veja os seguintes blocos). O circuito precisa de cerca de 12 mA por entrada para acionar um motor de 500 mA, tornando-o compatível com a lógica TTL ou CMOS.
Os transistores podem ser substituídos por unidades mais potentes. Se transistores de baixo ganho forem usados, você provavelmente precisará de mais corrente na entrada. O próximo bloco, usando transistores Darlington, pode ser importante se forem utilizados motores de passo de alta potência. Os transistores devem ser montados em dissipadores de calor.
9. Shield de motor de passo com MOSFETs
Este circuito foi adaptado do meu livro Robótica, Mecatrônica e Inteligência Artificial - Robotics, Mechatronics and Artificial Intelligence (esgotado) publicado nos Estados Unidos. Ele pode ser usado como um shield de controle para motores de passo em um projeto de mecatrônica ou robótica ou como um bloco de construção para projetos simples.
Os MOSFETs de potência podem ser usados para acionar motores de passo, como mostrado pela blindagem na Figura 13. A característica de entrada de alta impedância dos MOSFETs de potência os torna ideais para essa finalidade. Os MOSFETs de potência podem acionar motores com correntes de muitos amperes, dependendo do tipo. Este circuito pode ser acionado a partir de lógica TTL e CMOS e outros blocos.


