










Circuitos simples para serem agregados a projetos mecatrônicos são sempre interessantes. No entanto, apesar de que, em muitos casos soluções interessantes podem ser implementadas com poucos componentes, nem todos sabem como obtê-las. Os projetos dados a seguir consistem em idéias práticas que podem ser úteis numa infinidade de projetos que envolvem o controle de motores, efeitos ou a automação do funcionamento de pequenas partes de um robô ou dispositivo mecatrônicos.
Soluções simples com poucos componentes podem ajudar muito os projetistas de robôs, tanto em termos de custo como nos casos em que existe limitação de espaço para sua instalação.
Os circuitos simples que descrevemos podem ser adaptados em diversos tipos de aplicações com a mudança eventual dos valores de alguns componentes.
Astável com Relé
Um simples relé de baixo custo pode funcionar como um oscilador. ligando e desligando em intervalos que dependem apenas do valor do capacitor usado. Essa é a finalidade do nosso circuito, mostrado na figura 1.
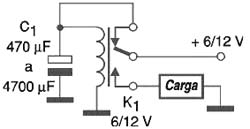
A constante de tempo do circuito e portanto a velocidade com que o relé abre e fecha os contactos, depende da resistência se sua bobina e do valor do capacitor. Constante de alguns segundos até mais de 20 segundos podem ser obtidas com componentes comuns.
Se a carga controlada usar tensão de alimentação diferente da bobina do relé pode ser empregado um relé de dois contactos reversíveis.
Dentre as aplicações para este circuito sugerimos:
- Pisca-pisca, alimentando lâmpadas de sinalização
- Controle de motores de modo intermitente
- Acionamento de solenóides em armas de robôs ou outras ferramentas de uso intermitente
- Efeitos de movimento intermitentes acionando motores, solenóides ou SMAs.
Aviso de Sobrecarga
Quando um motor estanca ou ainda passa a exercer uma força maior do que anormal por encontrar resistência, o circuito mostrado na figura 2 entra em ação, fazendo acende um LED de aviso.
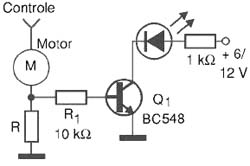
O ponto de acionamento depende basicamente da tensão que aparece no resistor R. Esse resistor deve ser calculado para que, na corrente em que se deseja o acendimento do LED a queda de tensão seja de 0,7 V aproximadamente. Isso pode ser calculado pela seguinte fórmula:
R = 0,7 x I
Onde:
R é a resistência (ohms)
I é a corrente de acionamento (A)
O resistor deve ter pelo menos 1 W de dissipação para correntes até 1 A.
Chave de Sobrecarga
O princípio de funcionamento deste circuito é o mesmo do anterior, com a diferença que usamos um relé para desligar a alimentação do motor em caso de sobrecarga. Para essa finalidade usamos um SCR, conforme mostra a figura 3.
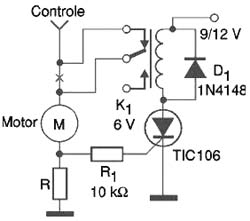
No caso, os SCRs possuem uma “trava”, ou seja, uma vez disparados, mantém-se ligados e com isso o motor deixa de ser alimentado até que o problema seja sanado.
Para rearmar o circuito, basta pressionar S1 por um momento.
O circuito deve ser alimentado com uma tensão pelo menos 2 V maior do que a usada pela bobina do relé, pois existe uma “perda” dessa ordem no SCR.
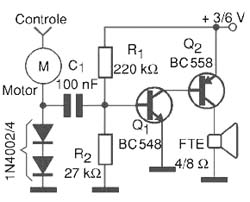
Efeito de Som para Motor
Com o circuito mostrado na figura 4, os pulsos que são gerados pelas escovas do motor são amplificados e aplicados a um pequeno alto-falante ou outro transdutor de baixa impedância.
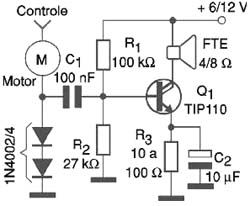
O resultado disso é a produção de um som, semelhante ao zumbido de um motor, quando ele funciona, mas de uma forma bastante amplificada.
Os diodos que retiram o sinal do circuito produzem uma pequena queda de tensão na alimentação do motor, da ordem de 1,4 V, o que deve ser levado em conta se a aplicação exigir o máximo do motor.
A alimentação para o circuito amplificador pode ser feita com tensões de 6 a 12 V e o transistor amplificador admite equivalentes. Um pequeno alto-falante de 5 a 10 cm pode ser usado como transdutor.
Efeito de Som para Motor – 2
O circuito mostrado na figura 5 pode funcionar com tensões mais baixas e têm menor potência funcionando segundo o mesmo princípio descrito para o efeito anterior.
Veja que a tensão de alimentação do circuito não precisa ser a mesma usada na alimentação do motor.
Simples Sensor Temporizado
O circuito mostrado na figura 6 aciona por alguns segundos um relé a partir do sinal obtido de um sensor do tipo on/off de contacto momentâneo como um sensor de obstáculos, batidas ou posição com reed-switch.
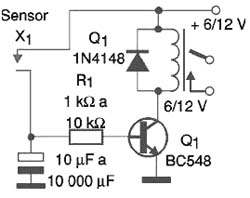
A temporização depende tanto do valor do capacitor como do resistor R1. No entanto, esse resistor não pode ter valores acima de uns 10 k ohms, dependendo do ganho do transistor. Também deve ser levado em conta que, o tempo de fechamento dos contactos do sensor deve ser suficiente para se obter a carga completa do capacitor.
Os melhores resultados são obtidos com relés sensíveis, cuja corrente seja no máximo 50 mA, e com alimentação na faixa de 6 a 12 V.
Outra possibilidade que deve ser levada em conta neste circuito é que diversos sensores podem ser ligados em paralelo e que podemos até formar uma porta de acionamento lógico tipo “E” com dois sensores ligados em série, conforme mostra a figura 7.
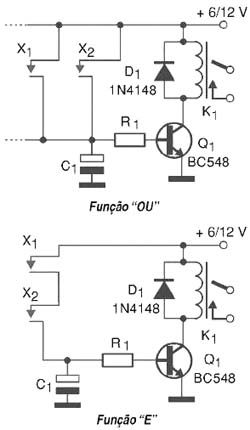
Nesse circuito, teremos o disparo do relé e acionamento temporizado somente se os sensores forem ativados ao mesmo tempo (função lógica E ou AND).
Uma forma de se obter uma temporização mais longa a partir de um sensor é usando uma configuração complementar de transistores, conforme mostra a figura 8.
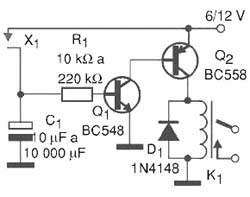
Essa configuração permite aumentar o valor do resistor de temporização para valores até uns 220 k ohms dependendo dos transistores usados. Isso eleva o tempo obtido para valores que superam os dois minutos.
Se usarmos como segundo transistor (PNP) um BD136 podemos controlar diretamente cargas até 500 mA sem a necessidade de um relé. No entanto, esse transistor deverá ser montado num pequeno radiador de calor.
Conclusão
O que vimos foram apenas algumas idéias práticas simples de circuitos que podem ser implementados no seu projeto. Valores de componentes ou mesmo alterações podem ser experimentadas.
Outra possibilidade consiste em se associar esses circuitos como blocos que agregam um comportamento “inteligente” ao seu projeto. Por exemplo, o relé astável agregado ao temporizados e sensor de corrente pode fazer com que, em caso de sobrecarga o “robô” tenha o motor funcionando de modo intermitente por certo intervalo de tempo.





