










Um componente de vital importância nos projetos de mecatrônica é o encoder, ou sensor codificador de movimento ou posição. Este sensor fornece as informações sobre a posição ou movimento de partes móveis de um equipamento de modo que ela possa ser controlada de forma precisa. A CUI INC é um dos grandes fabricantes de encoders que são vendidos através da Mouser Electronics. Neste artigo focalizamos alguns deles e fornecemos informações sobre seu uso.
Os encoders ou sensores de posição podem ser basicamente de três tipos: magnéticos, ópticos e capacitivos.
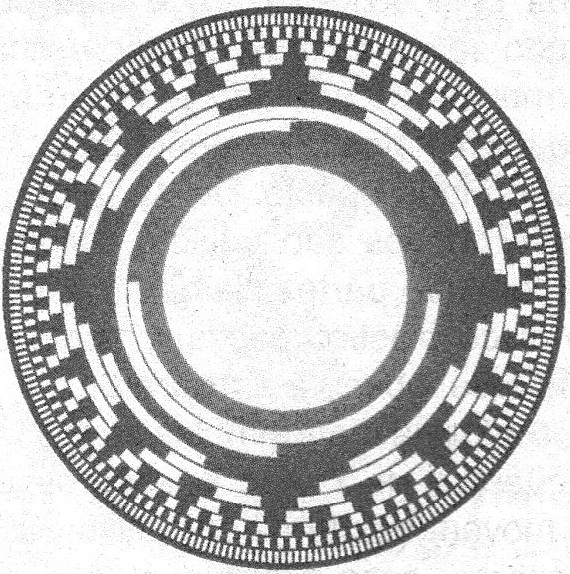
No encoder óptico existe um disco perfurado ou ainda uma fita para os sensores lineares onde a posição monitorada é dada pela leitura codificada dos pontos claros e escuros do disco ou da tira, conforme a sua posição. A figura 1 mostra um exemplo.

Na figura 2 temos um exemplo de disco de um encoder óptico absoluto. Nesta figura mostramos um disco de encoder com 6 trilhas o que significa 6 bits ou 64 posições de resolução de leitura.
No encoder magnético em lugar do disco perfurado ou com regiões de claros e escuros temos um disco magnético com regiões magnetizadas. Assim, os bits da informações da posição são lidos por um sensor magnético que tanto pode ser uma bobina como um sensor de efeito hall.
Da mesma forma, o número de sensores ou trilhas com regiões magnetizadas determinada a resolução do encoder. Na figura 3 temos um exemplo de um encoder magnético rotativo e um linear.

Finalmente, temos os encoders capacitivos, que pelas suas características podem ser utilizados numa faixa muito mais ampla de aplicações que os demais.
Encoders Capacitivos
Conforme o nome indica, os encoders capacitivos se baseia na mudança de capacitância do disco de leitura quando sua posição se altera.
Na figura 4 temos a estrutura básica de um sensor deste tipo.

A leitura da posição é feita medindo-se a reatância capacitiva entre a as placas estacionárias quando a placa móvel modifica sua posição.
O sinal obtido passa por um demodulador e um filtro que normalmente tem uma frequência de corte de 1 kHz que é um fator importante na determinação da resolução.
O encoder capacitivo tem algumas vantagens em relação aos demais, como a possibilidade de fornecer simultaneamente a medida da velocidade e da posição. Além, disso o seu consumo é menor ele pode ser blindado, o que lhe garante maior durabilidade e confiabilidade em ambientes hostis.
Os encoders podem ser obtidos em diversas configurações de leitura que permitem a leitura de uma pela que gire (rotary), que se mova de modo linear (linear) ou ainda num arco (arc). Na figura 5 mostramos exemplos.

A Mouser Electronics oferece uma ampla linha de encoders capacitivos da CUI que se caracterizam por apresentar características que se adaptam a uma enorme variedade de aplicações,
Por exemplo, podemos citar os sensores AMT23 (mostrados na figura 5) que se caracterizam or um baixo consumo (da ordem de 8 mA) e podem ser alimentados com tensões na faixa de 3,8 a 5,5 V.
Esses sensores têm uma resolução de 12 ou 14 bits o que significa uma precisão de 0,2 graus.
A saída é serial SSI com uma taxa de dados média de 1 MHz conforme mostra a figura 6, em que temos as características do sinal.

No site da Mouser Electronics (br.mouser.com) é possível acessar toda a linha de encoders capacitivos da CUI bastando digitar na busca “encoders CUI”.
Nesta busca podem ser encontrados tipos para montagem em placa, snap in, painel e com muitas outras características que podem ser importantes para seu projeto.





