










Você acredita que é possível fazer uma escova andar sem rodas ou acoplamentos mecânicos a um motor? Esse interessante projeto mostra como isso é possível. Simples de montar, trata-se de um pequeno robô montado com uma escova que anda pela casa, bate-volta nos obstáculos e pode ser utilizado em interessantes competições escolares.
Veja mais:
Apostila do Robô Escova (PV009)
Controle bilateral de motores (MEC018)
Idéia é simples. Colocamos sobre uma escova comum um motor e sua alimentação feita por pilhas. No eixo do motor prendemos um pequeno objeto, como uma arruela ou porca de modo que sua rotação ocorra de forma excêntrica, criando forte vibração.
Entortando as cerdas das escova para traz, por aquecimento, a vibração faz com que o robô avance rapidamente com a transferência das vibrações. A figura 1 mostra o que ocorre.
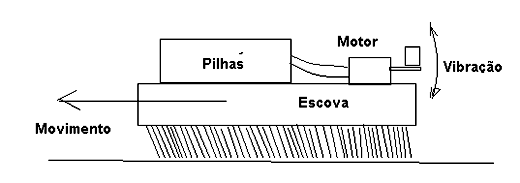
Figura 1 - O robô avança com o movimento vibratório das cerdas transmitido pelo motor.
Utilizamos a montagem deste robô com os alunos da quinta série do ensino fundamental do colégio Mater Amabilis de Guarulhos com grande sucesso.
Conforme podemos ver pelo filme, usando uma escova oval, o robô bate e volta quando encontra algum obstáculo. Assim, solto numa sala, ele ficará andando aleatoriamente. Numa arena ele ficará batendo e voltando de modo intermitente até que suas pilhas esgotem ou ele seja desligado, conforme mostra a figura 2.
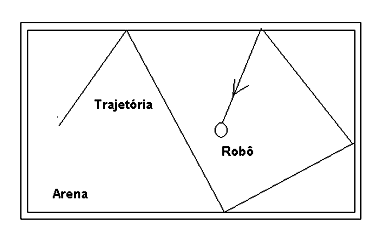
Figura 2 - Numa arena, o robô ficará batendo e mudando de trajetória constantemente.
Diversas competições podem ser programadas com base neste comportamento bate-e-volta do pequeno robô escova.
a) Coloque um pino no centro da arena e depois dois ou mais robôs de alunos que serão soltos simultaneamente. Aquele que derrubar o pino em primeiro lugar é o vencedor da prova. A figura 3 mostra esta prova.
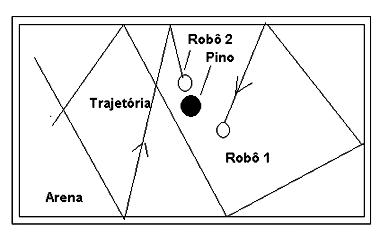
Figura 3 - Prova de derrubada do pino.
b) Faça raias (duas ou mais) com tabuinhas finas de modo que os robôs possam correr dentro delas. Neste caso, pode ser realizada uma corrida de robôs. A figura 4 mostra como fazer isso
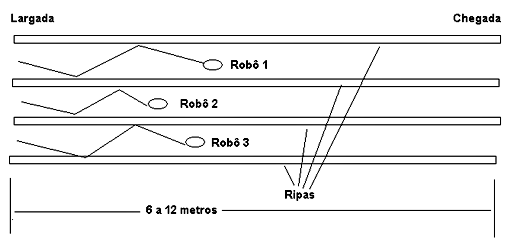
Figura 4 - Corrida de robôs.
c) Finalmente, sugerimos uma competição em que usamos uma meta (gol) dentro de uma arena. Os robôs são soltos e o primeiro que conseguir atravessá-la será o vencedor, conforme mostra a figura 5.
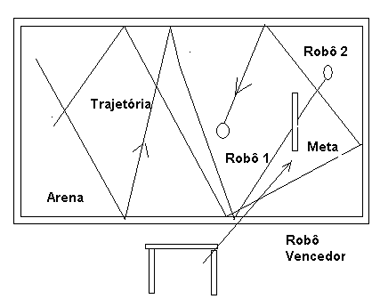
Figura 5 - Prova em que o robô deve atravessar a meta (gol).
Montagem
A montagem do robô escova é extremamente simples. Usamos uma escova Cignus 16 , que pode ser encontrada na maioria dos supermercados. Para uma competição escolar será interessante que todos usem a mesma escova, para que haja uniformidade de desempenho dos robôs.
O circuito consiste simplesmente num motorzinho de pilhas ligado a um suporte de duas pilhas, conforme mostra a figura 6.
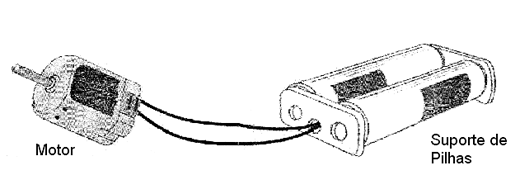
Figura 6 - Circuito elétrico do propulsor do robô.
Para o caso de alunos da quinta série do fundamental, os motorzinhos já são fornecidos soldados aos fios do suporte de pilhas para os alunos.
A montagem inicia-se com a colocação de um pequena porca ou arruela presa ao eixo de modo excêntrico, conforme mostra a figura 7.
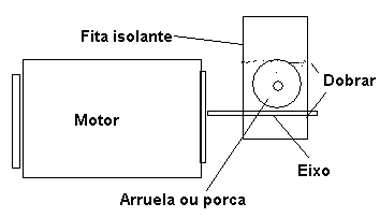

Figura 7 - Colocando o peso excêntrico no eixo.
A escova que usamos é do tipo mostrado na figura 8.

Figura 8 - Escova utilizada no projeto.
Na fase seguinte da montagem, entortamos as cerdas da escova num sentido usando para esta finalidade ar quente. Passando a mão pelas cerdas e focalizando o ar quente de um secador de cabelos, entortamos levemente as cerdas da escova, conforme mostra a figura 9.
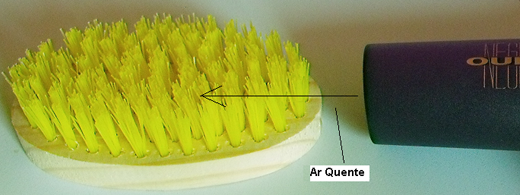
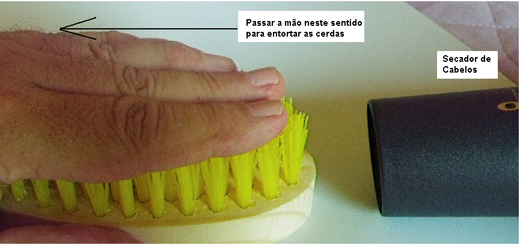
Figura 9 - Entortando as cerdas com ar quente.
Depois colamos o motor e o suporte de pilhas na superior da escova usando cola forte (cola quente, super-bond, cola plástica, etc.). A figura 10 mostra como isso é feito.

Figura 10 - Motor e suporte colados na escova.
Os fios são mantidos desligados e são ligados quando desejamos que o motor funcione. Pode-se manter os fios ligados e tirar as pilhas do suporte para desligar.
Coloque as pilhas no suporte e verifique se o motor gira e haja uma boa vibração.
Testando e Usando
Basta colocar as pilhas no suporte e soltar o robô no chão liso ou numa mesa. Ele deve deslocar-se rapidamente, como ostra o nosso filme.
Comprovado o funcionamento é só usar seu robô, programar as demonstrações e surpreender seus amigos.
Lista de Material
1 escova Cignus 16 ou equivalente
1 motor de 3 ou 6 V (*)
1 suporte para duas pilhas pequenas e duas pilhas pequenas
1 arruela ou porta pequena
Cola
1 pedaço de fita isolante





