Nos artigos anteriores (MEC307 e MEC308) abordamos diversos circuitos de shields e breakout boards para motores de corrente contínua e motores de passo. Nesses artigos também focalizamos alguns cuidados que devem ser tomados no uso desses motores. Neste artigo, continuamos com nossa seleção de circuitos de shields, obtida de nosso arquivo Banco de Circuitos (temos mais de 13 000 deles no momento em que escrevemos este artigo) tratando agora de motores de corrente alternada.
Neste artigo também traremos artigos relacionados com motores, tais como fontes, acionamentos isolados, circuitos de proteção etc.
O que diferencia os motores de corrente alternada (AC ou CA) é o fato de que em muitos casos estão ligados à rede de energia e, obviamente que precisam de uma tensão alternada para alimentação, que não pode ser fornecida pela maioria dos circuitos eletrônicos, principalmente os microcontroladores.
O principal problema, entretanto, ocorre quando trabalhamos com motores ligados à rede energia. O isolamento dos circuitos de controle é fundamental sendo o mais comum o que faz uso de acopladores ópticos. Diversos circuitos deste tipo serão dados a seguir.
1 - Shield para computadores antigos
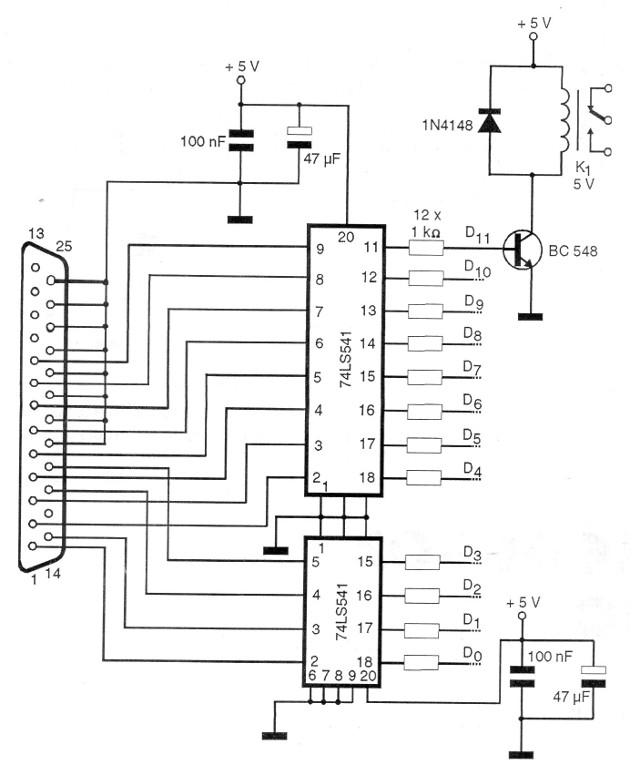
Se você tem um computador antigo fora de uso, do tipo que ainda tem porta paralela, pode usá-lo em seus projetos de automação e controle com esta interface de 1997. O circuito usa integrados TTL e o programa de controle deve ser configurado para LPT2. O conector é centronics DB25.
2 - Shield com acoplador óptico bidirecional e motor AC
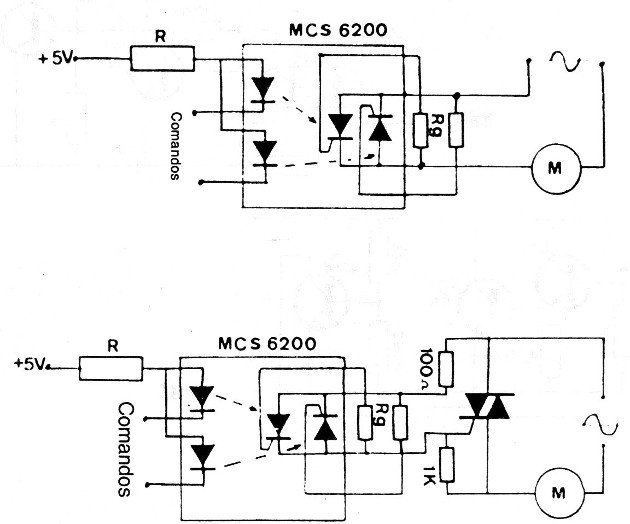
Este shield pode ser controlado por tensões positivas ou negativas do sensor funcionando como um controle bidirecional de motores. O acoplador com dois diodos emissor e dois foto-SCRs não é comum em nossos dias, mas a configuração pode ser simulada com dois opto-acopladores separados. O circuito é de uma documentação dos anos 70.
3 - Shield isolado para SCR
Este shield isolado usa um acoplador óptico comum que admite vários equivalentes. O resistor em série com o LED emissor pode ser de 330 ohms para 5 V e o resistor em paralelo pode ser omitido na maioria dos casos. O circuito é de uma documentação antiga e o resistor entre a base e o emissor é de 10k tipicamente.
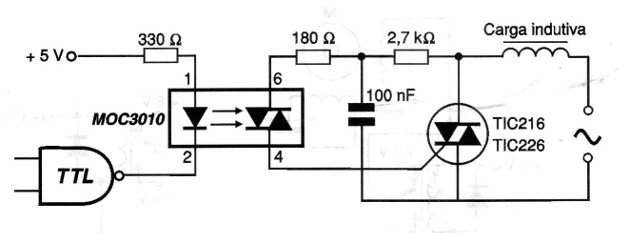
4 - Shield isolado para cargas indutivas (motores)
Este shield para controle de triac usa um opto-diac no controle de um triac. O circuito é otimizado para o controle de cargas indutivas. Em lugar do acionamento TTL pode ser feito o acionamento pela saída de um microcontrolador.
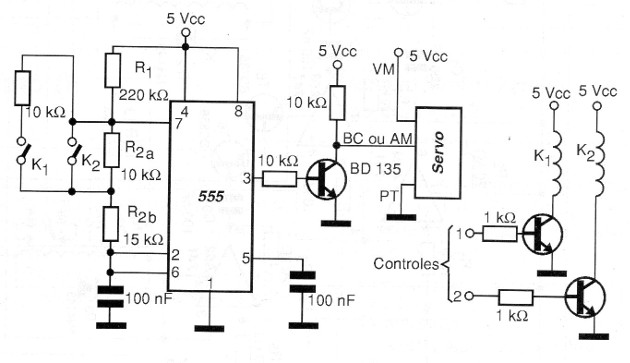
5 - Controle para servomotor
Este é um daqueles circuitos que frequentemente o projetista procura mas tem dificuldades em encontrar. Sua utilidade é patente quando se deseja usar um servomotor comum, do tipo que pode ser adquirido em casas especializadas em aeromodelos em algum tipo de projeto prático que envolva o controle de posição. Não se limita portanto o projeto a aplicações em robótica e modelismo, mas vai muito além sua utilidade conforme o leitor pode facilmente perceber. O circuito pode ser adaptado para operar como shield de microcontroladores. Encontramos esta configuração numa documentação de 2008.
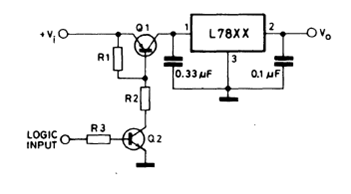
6 - Shutdown remoto para o 78xx
Este circuito é do manual de circuitos integrados lineares da SGS de 1982. O L78xx é equivalente da SGS para os 78xx comuns onde o xx determina a tensão de saída. O transistor Q1 pode ser um TIP32 e Q2 pode ser um BC548. O circuito pode ser controlado por lógica CMOS ou TTL com R3 de 1k. R1 pode ser de 470 ohms e R2 de 220 ohms. O circuito pode ser usado como shield para microcontroladores cortando a alimentação de um motor em condições determinadas pela lógica.
7 - Shield isolado para motores AC
Este circuito isola uma etapa com Triac de um circuito de disparo TTL ou CMOS, por exemplo. O circuito pode ser usado com triacs da série TIC com corrente de acordo com a carga controla, um motor, por exemplo. Encontramos este circuito numa Poptronics dos anos 90.
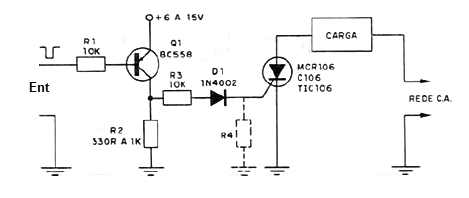
8 - Shield para disparo de SCR em AC
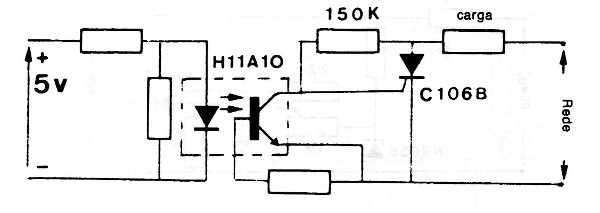
Na figura abaixo temos o modo de se fazer uma interface simples que permite disparar SCRs e também TRIACs sensíveis a partir de saídas de microcontroladores. A corrente de disparo deste circuito depende de R3 que, para o caso de TRIACS deve ser reduzido para 470 ohms. Veja que o setor de alta tensão e o setor de baixa tensão possuem terras em comum, o que significa que não há isolamento entre o microcontrolador e a rede. A rede pode ser tanto de 110 V como 220 V. R4 pode ser necessário quando forem usados SCRs sensíveis como o TIC106 e seu valor estará entre 1k e 4k7. A corrente de entrada deste circuito é da ordem de microampères e o disparo se faz no nível baixo da saída do microcontrolador.
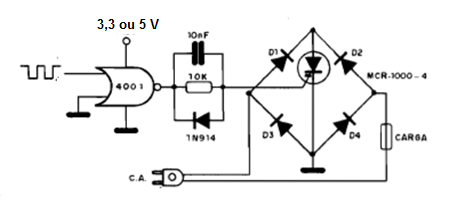
9 - Shield para SCR e onda completa
Este circuito chaveia sinais de um SCR a partir de sinais digitais de uma saída de microcontrolador aplicados a uma porta 4001. A carga depende do SCR usado. Veja que o SCR usado é um MOS SCR e os diodos devem ser capazes de conduzir a corrente da carga controlada. A alimentação do CMOS pode ficar entre 5 e 12 V. O MOS SR não é componente comum, mas tipos como o TIC106 podem ser experimentados.
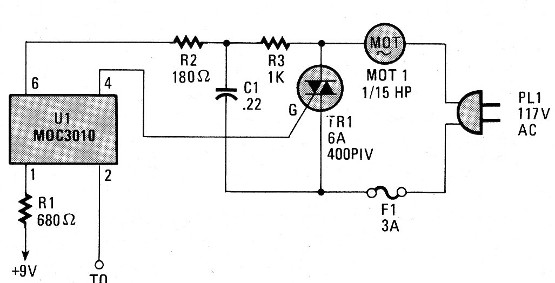
10 - Dimmer ou controle de motor AC digital
Com este circuito podemos controlar a potência de um motor ou a potência de uma carga resistiva a partir de um sinal digital. O circuito é de uma publicação antiga, fazendo uso de componentes que ainda podem ser obtidos com facilidade. O triac é de acordo com a carga controlada. O circuito pode ser adaptado para ser usado como shield.
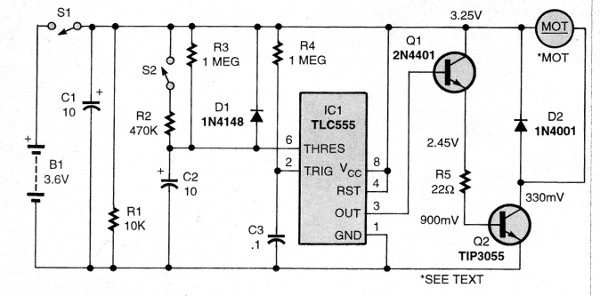
11 - Temporizador para motor
Este circuito é indicado para determinar o tempo de vôo de um aeromodelo com motor elétrico. O circuito pode também ser usado em outras aplicações. Os transistores admitem equivalentes. Encontramos esta configuração numa revista americana dos anos 80. Para uma aplicação como o shield retira-se S2 e aplica-se o sinal de controle (pulso) em S2.
12 - Shield reversor para motores AC
Encontramos esta configuração no manual de tiristores da ON Semiconductor. Os triacs dependem do motor que deve ser de tipo com dois enrolamentos para sentidos diferentes de rotação. O circuito é controlado por acopladores ópticos. Os acopladores ópticos são acoplados às saídas de microcontroladores tendo em série resistores tipicamente entre 270 ohms e 330 ohms.