Neste segundo circuito da série (o primeiro está em MEC307) abordamos circuitos de shields para motores de passo. Estes shields são necessários dada não só a corrente exigida pelos motores como em alguns casos a lógica. Alguns circuitos consistem em apenas um componente sendo, portanto, breakout boards.
As características gerais dos motores de passo são as mesmas dos motores de corrente contínua. São cargas indutivas que exigem tensões e correntes apropriadas para serem excitados.
A diferença está no número de bobinas e a sequência ou modo de acionamento que depende da aplicação e do motor.
Para os leitores interessados em saber mais sobre esses motores sugerimos a leitura do artigo MEC306 – Motores de passo, como funcionam.
De um modo geral podemos dizer que muitos shields comuns para acionamento simples de motores DC podem ser usados com motores de passo, desde que colocados em quantidade de acordo com o número de enrolamentos do motor.
Da mesma forma, os cuidados com corrente, transientes e outros que vimos no artigo anterior, também são válidos neste caso.
Muitos dos circuitos dados são de nosso banco de circuitos podendo usar componentes que já não mais são comuns no nosso mercado. No entanto, pesquisando na internet podem ser encontrados equivalentes mais modernos.
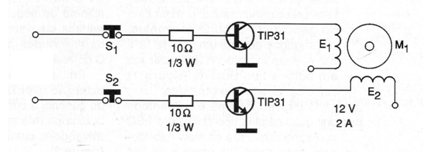
1 - Shield experimental de motor de passo
Este circuito experimental para movimentar um motor de passo foi encontrado numa documentação de 2002. No entanto, dada a sensibilidade dos TIP31, a excitação pode ser feita com tensões a partir de 3 V o que permite usá-lo como shield para microcontroladores. Aplicando a sequência correta de pulsos nas entradas podemos movimentar o motor de muitas formas.
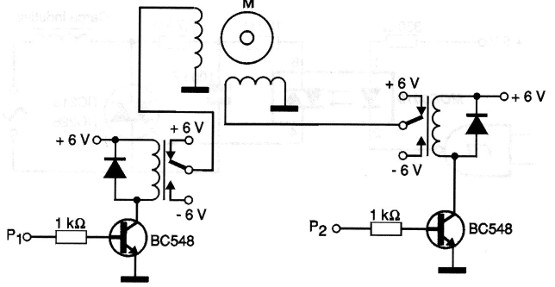
2 - Controle de motor de passo de duas fases
Usando relés de 5 V, este circuito pode ser usado como shield de controle para microcontroladores. O circuito faz uso de relés de modo que a tensão do motor independe da tensão de controle.
3 - Shield de motor de passo L293
O componente usado neste shield não é muito comum atualmente. Encontramos este circuito no manual de circuitos integrados lineares da SGS de 1982. Trata-se de um controle para motores bipolares com as entradas de controle nos pinos 2, 7, 10 e 15. Podemos usar o circuito como shield para microcontroladores.
4 - Controle de motor de passo com o L702
O circuito integrado usado consiste num “array” de transistores Darlington para correntes até 3 A. Na figura temos o modo de se controlar um motor de passo de 4 fases. O circuito é do manual de circuitos integrados lineares da SGS de 1982. Podemos usar este circuito como shield para microcontroladores. Veja que, como o integrado usado é pouco comum, podemos montar a mesma configuração com Darlingtons discretos.

Este circuito é de uma documentação de 2000 destinando ao controle de motores de 12 V com 500 mA. O circuito pode servir de shield para microcontroladores já que sua entrada é compatível com lógica TTL.
6 - Breakout board de 4 entradas para motor de passo
O circuito mostrado na figura, consiste na aplicação direta do ULN2003 em que temos 4 entradas diretas para os buffers do circuito integrado. Nesta aplicação as entradas podem ser obtidas de lógica digital TTL ou CMOS ou diretamente da porta paralela de um PC. Cada enrolamento do motor de passo é energizado quando a entrada correspondente é levada ao nível alto. Assim, no software que vai ser utilizado deve-se prever tanto o tempo de acionamento de cada saída como sua sequência ou ainda posição para a aplicação desejada. Observe que há uma alimentação independente de 12 V para o motor de passo que operará com uma corrente máxima de 500 mA. No diagrama temos as cores dos fios com a identificação para um motor de passo convencional.
7 - Shield de controle de motor de passo
A corrente máxima das saídas do circuito integrado STK6982H no nível alto é de 1,2 A e 0,8 A no nível baixo. O STK é um circuito híbrido, não muito fácil de obter mas que resulta num excelente controlador de motor de passo com diversos recursos como pause, strobe e outros. Veja mais baixando o datasheet deste componente. A tensão de alimentação é de 36 V e a tensão de controle é de 5 V, podendo ser feita a partir de circuitos lógicos TTL.
8 - Shield de motor de passo
Este sequenciador permite o uso de interruptores ou sensores para gerar os passos de um motor de passo bipolar. Também podemos usar o circuito como shield. O circuito pode ser alimentado por tensões de 7 a 15 V, pois possui seu próprio redutor de 5 V para os componentes TTL. O circuito é do livro Mechatronics for the Evil Genius de Newton C. Braga. As saídas para o motor devem ser aplicadas às etapas de potência.
9 - Breakout board de motor de passo com o ULN200x
Esta é a configuração básica para usar o ULN2001 e MC1441 e outros da mesma série no controle de motor de passo com fases até 500 mA. O tipo usado depende do sinal de entrada que pode ser CMOS ou TTL. O circuito é do livro Mechatronics for the Evil Genius de Newton C. Braga.
10 - Sequenciador para motor de passo
Este circuito produz sequência de passos controlados por P1 e aplicados a um motor de passo de 12 V com até 500 mA de corrente de fase. O circuito pode ser alterado para receber pulsos externos CMOS de controle. Este circuito é do livro Mechatronics for the Evil Genius de Newton C. Braga, publicado nos Estados Unidos.
11 - Shield de controle de motor de passo
Este circuito foi encontrado numa publicação sobre computadores dos anos 70. Os transistores podem ser os BD135 para motores até 500 mA e TIP31 para motores até 2 A. A tensão do motor pode ser diferente da tensão dos circuitos lógicos. Os resistores de base dos transistores são de 1k.
12 - Shield de controle de motor de passo CMOS
Esta configuração, equivalente ao circuito anterior, foi encontrada numa publicação de 1976. As saídas dos circuitos lógicos são aplicadas às etapas de potência que fazem uso de transistores de acordo com a potência do motor. Como shield os sinais são aplicados ao pino 12 e os CMOS alimentados com 5 V.
13 - Shield para controle de motor de passo de duas fases LM377
Encontramos este circuito no Audio Handbook da National Semiconductor de 1977. Ele pode controlar pequenos motores de 3 W por fase. Os enrolamentos do motor são de 8 ohms sintonizados em 60 Hz através dos capacitores shunt. O circuito pode ser usado como shield com adaptações.
14 - Shield de motor de passo com o MC3479P
Este circuito de motor de passo foi encontrado no Linear Databook da Motorola de 1990. O circuito é de baixa potência, devendo ser consultado o datasheet do componente para mais informações. As entradas digitais devem ter tensões de acordo com a usada na alimentação.
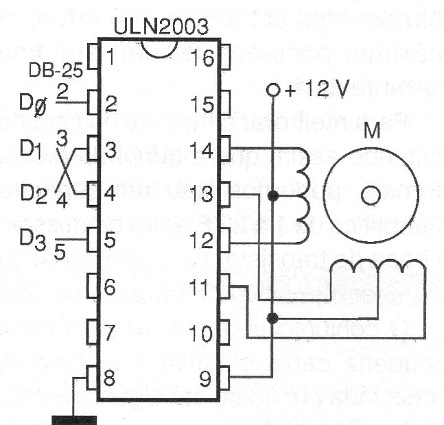
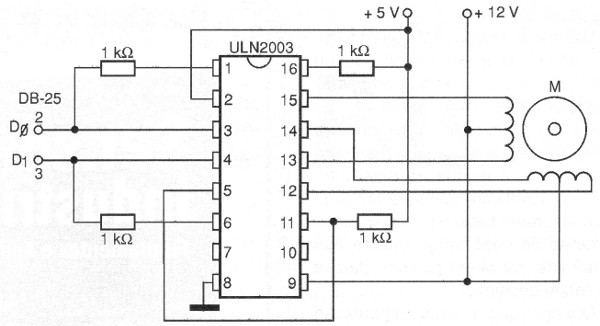
15 - Comando de duas entradas para motor de passo
Este circuito consiste numa variação de um controle de 4 entradas, com a diferença de que temos apenas duas entradas usadas. Assim, as bobinas são energizadas com a seguinte sequência de comandos de entrada que podem vir diretamente da porta paralela de um PC ou de lógica digital TTL ou CMOS:
Bobina 1 - 00
Bobina 2 - 01
Bobina 3 - 10
Bobina 4 - 11
Neste caso, a corrente máxima que o circuito integrado ULN2003 pode fornecer é de 500 mA por enrolamento. Veja que aqui temos uma fonte de alimentação dupla que deve ter 5 V para a lógica interna e 12 V para a alimentaç!ao do motor. É importante observar que o terra do CI no pino 8 deve ser comun ao PC ou circuito de acionamento digital e também ao circuito de 12 V e 5 V.
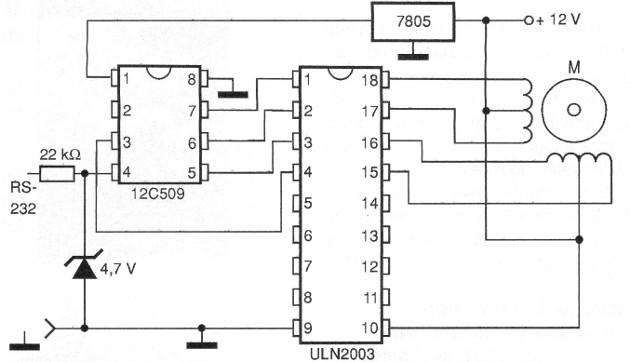
16 - Shield de motor de passo pela porta serial
O circuito mostrado na figura possibilita o controle de um motor de passo pela porta serial de um PC. Nesta aplicação temos a utilização do circuito integrado ULN2803 para o controle de potência com a capacidade de fornecer correntes de até 500 mA ao motor controlado. O circuito integrado 7805 reduz a tensão de 12 V da alimentação do motor para os 5 V necessários a lógica formada pelo circuito integrado 12C509. O diodo zener de 4V7 x 400 mW serve como filtro para desviar eventuais pulsos de maior tensão que estejam na linha de dados e possam causar problemas de funcionamento ao circuito.