










No projeto de robôs e outros tipos de veículos automatizados, um dos principais problemas encontrados pelo projetista está nos sensores que devem fazer as vezes dos "olhos" do mecanismo. A idéia de que uma câmera de TV resolve todos os problemas está errada, pois o que se tem é uma imagem complexas que necessita de um complicado software de análise para poder resultar em sinais de controle. O melhor mesmo é ainda o sensor individual, e para ele existem diversas alternativas que são exploradas neste artigo.
Os sensores de luz que podem equipar robôs experimentais ou mesmo definitivos são de extrema importância para poder garantir uma mobilidade segura num ambiente em que existam obstáculos.
Uma câmera de TV, conforme explicado na introdução, fornece uma imagem que precisa não apenas ser interpretada para poder resultar em impulsos de comando, mas ainda tem a dificuldade adicional de não dar a idéia de profundidade ou distância.
Para robôs didáticos, industriais ou mesmo feitos como recreação o melhor mesmo é contar com sensores individuais de pontos de luz que geram sinais que podem ser interpretadas muito mais facilmente por circuitos simples (lógicos ou não).
Os circuitos que damos a seguir utilizam sensores como LDRs e fototransistores, e a partir deles o leitor que está no campo da robótica e mecatrônica poderá tirar suas próprias idéias, alterando-os melhorando-os, ou mesmo usando-os da forma como estão.
OS CIRCUITOS
Na figura 1 temos um circuito simples que aciona um relé quando a luz que incide num LDR é cortada ou diminui de intensidade.
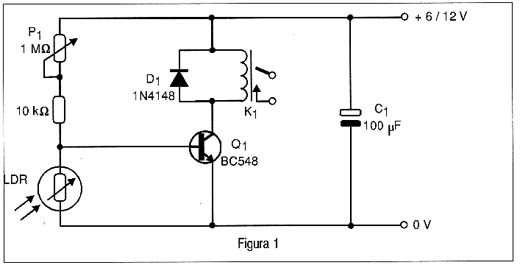
O potenciômetro P1 ajusta a sensibilidade do circuito.
O LDR deve ser instalado num tubo opaco dotado de uma lente convergente para se obter maior sensibilidade e diretividade.
Podemos usar esse circuito para acionar algum tipo de mecanismo ou reversão de motor quando um objeto tapar a luz que incide no sensor evitando, por exemplo, uma colisão.
No caso, sugerimos o uso de relé de contatos simples, mas podemos obter a reversão com um relé reversível de contatos duplos.
Para o acionamento, quando a luz aumenta de intensidade ou incide
no sensor, o circuito indicado é o da figura 2.
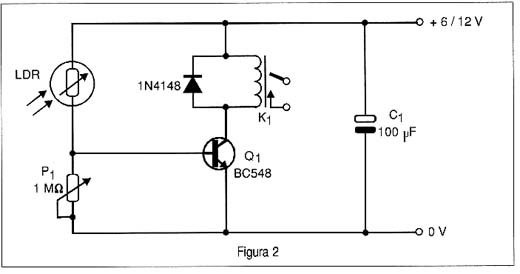
Da mesma forma que no caso anterior, ajusta-se a sensibilidade no potenciômetro ou trimpot P1.
O LDR também deve ser instalado em tubo opaco com lente, caso se deseje maior sensibilidade.
Nos dois circuitos a tensão de operação do relé deve ser a mesma usada na alimentação. Podem ser usados, relés com bobinas de no máximo 100 mA e a corrente dos contatos vai depender da aplicação.
O circuito apresentado na figura 3 tem duas características importantes: é mais sensível e pode alimentar diretamente uma carga de corrente contínua até 1 ampère.
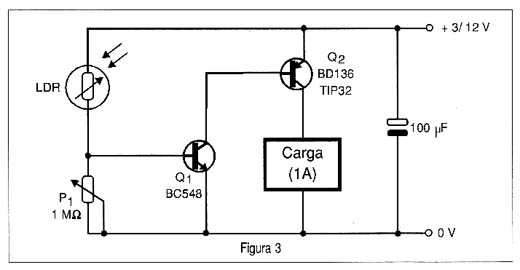
Para este circuito podemos até usar um fototransistor em lugar do LDR, tomando o cuidado de ligar em série um resistor de 10 k ohms para limitar a corrente no transistor Q1 em caso de problemas, e trocar o potenciômetro P1 de ajuste por outro de 4,7 M ohms.
Esse circuito aciona a carga quando ocorre um aumento da intensidade da luz incidente no sensor.
Trocando de posição o LDR com P1, como no circuito da figura 2, teremos o acionamento quando a luz diminuir sobre o sensor, ou ainda deixar de incidir sobre ele.
Na figura 4 temos uma versão que utiliza um transistor Darlington que pode controlar uma carga de até 1 A.
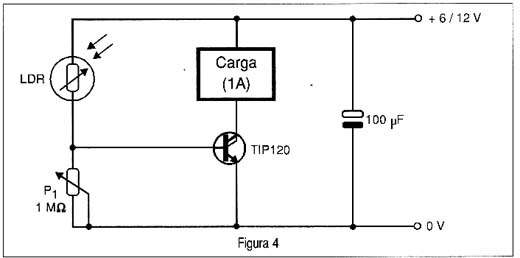
Esse circuito também aciona a carga quando a luz aumenta de intensidade e sua sensibilidade é ajustada em P1.
Observe que, tanto no caso do circuito da figura 3 como neste, a corrente na carga não comuta, passando de zero para o máximo num certo ponto de disparo. O circuito apresenta uma região de transição linear em que a corrente aumenta suavemente de intensidade na carga quando a luz varia numa certa faixa de intensidades.
Dependendo da aplicação esta característica deve ser considerada.
Os transistores de efeito de campo de potência além de sua sensibilidade podem controlar cargas de grandes potências.
Na figura 5 temos uma aplicação em que podemos usar um LDR como sensor, ou ainda, alterando P1 para 4,7 M ohms ou mesmo 10 M ohms um fototransistor ou fotodiodo.
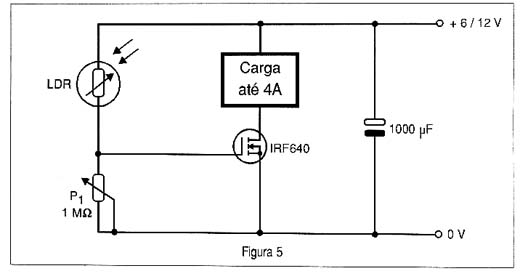
Este circuito alimenta a carga quando a luz incide ou aumenta de intensidade no sensor. Observe que a transição da corrente na carga é lenta se a variação da intensidade de luz no sensor for suave.
Para termos uma sensibilidade muito maior no acionamento de um relé quando luz incide num sensor, e assim poder empregar um fototransistor ou fotodiodo como sensor, sugerimos o circuito da figura 6.
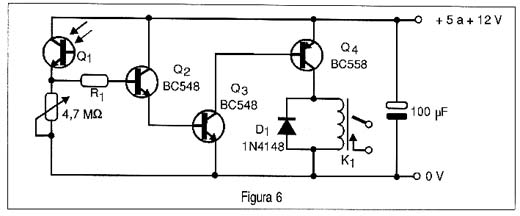
Com a troca do transistor Q4 por um TIP32 ou ainda um BD136 podemos controlar diretamente cargas de corrente contínua. Para o BD136 a corrente máxima recomendada é de 500 mA, e para o TIP32 poderá ir a mais de 1 ampère. Os transistores de potência, neste caso, devem ser montados em radiadores de calor.
A tensão de alimentação depende do relé ou da carga que vai ser controlada. O resistor R1 neste circuito tem valores típicos entre 1 k ohms e 10 k ohms.
Na figura 7 observamos um interessante tipo de circuito que é o sensor diferencial.
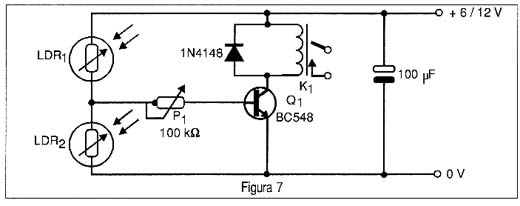
Esse circuito pode ser usado como direcionador de um robô, pois se a intensidade da luz que incide nos sensores aumentar ou diminuir de forma igual (quando ele está apontado para uma abertura clara ou fonte de luz ou lugar escuro), o relé não será ativado.
No entanto, se ele sair da direção desejada tendendo para o lado de LDR1 (claro) ou LDR2 (escuro), o relé será ativado, atuando sobre algum tipo de dispositivo que corrige sua trajetória.
A sensibilidade geral é controlada em P1 e para maior diretividade, os sensores devem ser montados em tubos com lentes apontados de forma estudada de modo a se obter o comportamento desejado.
A obtenção de transições rápidas quando a luz varia sobre o sensor, podendo, desta forma, ser usada em circuitos lógicos digitais ou ainda no disparo de relés ou outros dispositivos (com a ajuda de uma etapa de potência) é feita com os circuitos da figura 8.
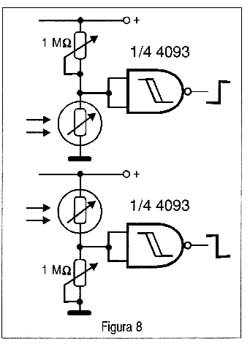
Nos dois circuitos os sensores podem ser LDRs ou fototransistores, caso em que o valor do potenciômetro de ajuste deve ser aumentado para 4,7 M ohms ou mesmo 10 M ohms, dependendo da sensibilidade desejada.
No primeiro circuito, a saída vai ao nível alto quando a luz aumenta de intensidade no sensor, passando de um limiar pré-ajustado. No segundo, a saída vai ao nível baixo quando a luz aumenta ou vai ao nível alto quando diminui de intensidade.
Amplificadores operacionais funcionando como comparadores de tensão possibilitam a elaboração de circuitos que têm uma transição muito rápida de saída quando a intensidade de luz no sensor passa por certo valor limiar de intensidade.
No primeiro circuito, ilustrado na figura 9, o relé dispara quando a luz aumenta de intensidade passando por um limiar que depende do ajuste de P1.
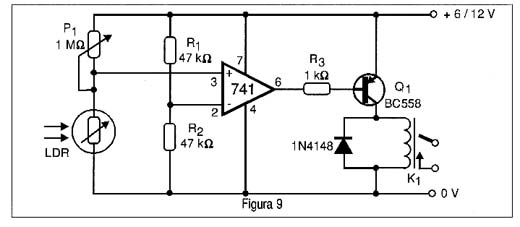
Podemos inverter sua ação de duas maneiras: trocando de posição P1 com o LDR, ou mudando a etapa de saída de modo a usar um transistor PNP.
Limiares muito baixos de intensidade também podem ser conseguidos com a alteração de R2, que pode ser diminuído até 1 k ohms ou menos.
Para usar um fototransistor como sensor, basta aumentar o valor de P1.
O circuito integrado 741 sugerido neste circuito não opera com tensões menores que 9 V. No entanto, operacionais como LM324 podem ser utilizados para estes casos ou até tipos com transistores de efeito de campo na entrada como CA3140.
Para obtermos um circuito com trava, ou seja, em que o relé permanece ativado mesmo depois que o estímulo (luz ou sombra no sensor) desaparece, podemos usar o circuito da figura 10.
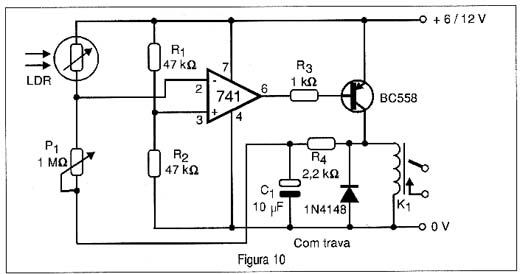
As duas modalidades de operação são obtidas com a troca de posições entre o LDR e o potenciômetro P1.
A prontidão na ação de trava pode ser alterada bastando para isso escolher o valor apropriado de C1. Este componente pode assumir valores entre 10 µF e 100 µF.
Também neste caso, amplificadores operacionais de menor tensão podem ser usados e são recomendados justamente no caso de alimentações inferiores a 9 V.
O circuito da figura 11 é o denominado "discriminador de janela".
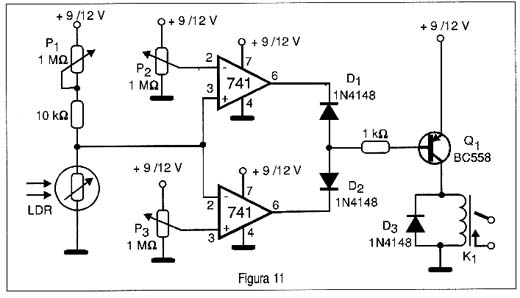
Este circuito ativa o relé quando a intensidade de luz no sensor está dentro de certa faixa, ou ainda fora desta faixa dependendo do modo como o sensor é ligado. Neste caso também, P1 e o LDR podem ter suas posições intercambiadas para essa finalidade.
Assim, na figura existe uma faixa de luminosidade que é ajustada por P1 e P2 em que as saídas dos operacionais estão no nível alto e o relé não permanece ativado. Quando a luz cai abaixo do limiar inferior ajustado em P3, D2 conduz, e o relé é ativado. Por outro lado, quando a intensidade supera certo valor, é D1 que conduz e novamente o relé fecha.
Veja que este circuito pode ser usado como um sensor "inteligente" para um robô que procura a luz, mas tem sua ação inibida quando ele se aproxima demais dela.
Num robô que tenha este circuito, teremos a possibilidade de vê-lo rodear uma lâmpada a uma distância segura, sem se aproximar demais ou sem se afastar.
Utilizando o circuito integrado 555 também podemos elaborar alguns circuitos de sensores de robôs interessantes.
Na figura 12 temos um monoestável que produz um pulso de saída controlado quando um pulso de luz de curta duração é aplicado ao LDR.
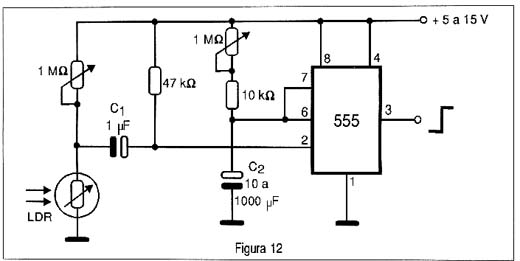
Este circuito pode ser usado não somente como detector, mas também para se enviar um sinal de comando a um robô utilizando-se uma lanterna comum.
O controle PWM de um motor que movimente um robô pode ser feito com base no circuito da figura 13.
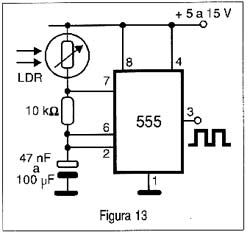
A frequência do sinal de saída depende do valor do capacitor usado e também da quantidade de luz que incide no LDR.
Os pulsos também podem ser utilizados para controlar lógica existente no robô, e até integrados para controlar um circuito de corrente contínua.
Para obter um ajuste de frequência pode-se ligar em série com o resistor de 10 k ohms um potenciômetro de 1 M ohms.
Outra forma de obter um sinal cuja frequência dependa da luz que incide num sensor (LDR), e com um ciclo ativo de 50% aproximadamente, é com o circuito mostrado na figura 14.
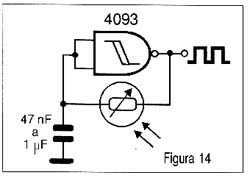
A frequência central, que depende do nível considerado normal no sensor, é dada pelo capacitor, que pode ter valores típicos na faixa indicada.
Esse circuito pode fornecer sinais de até 4 MHz com alimentação de 12 V. Diminuindo a tensão de alimentação, também reduzimos a máxima frequência que ele pode gerar.
O circuito da figura 15 tem dois sensores que determinam o ciclo ativo do sinal gerado.
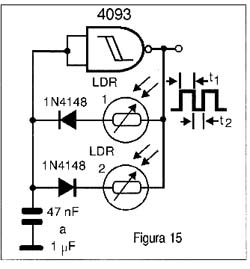
Quando a luz aumenta no LDR1, o tempo no nível alto da saída diminui. Por outro lado, quando aumenta a intensidade da luz no LDR2, diminui o tempo no nível baixo.
A ação simultânea da luz sobre os dois sensores atua sobre a frequência e sobre o ciclo ativo.
O valor do capacitor é escolhido de acordo com a faixa de frequências que se pretenda gerar.
CONCLUSÃO
Os circuitos que apresentamos são apenas algumas sugestões do que pode ser feito para se dotar um robô ou automatismo de "olhos" eletrônicos. Estes circuitos tanto podem ser alterados quanto multiplicados de modo a formar "matrizes" capazes de detectar não somente pontos de luz, mas imagens complexas.
Como fazer isso, depende apenas da imaginação de cada um.





