










A necessidade de monitorar a posição de peças móveis, medir sua velocidade de deslocamento ou rotação está presente tanto em equipamentos industriais como de consumo, eletrônica embarcada e em muitos outros setores. Uma solução amplamente adotada é a que faz uso se sensores magnetorresistivos. Veja nesta artigo como eles funcionam e quais são as suas principais características. O artigo foi baseado em informações do Application Note 20 da Zetex.
Os sensores magnetorresistivos são componentes cuja resistência elétrica depende da intensidade do campo magnético que corta seu elemento sensível além do ângulo segundo o qual isso ocorre.
Variações de intensidade (e/ou orientação) de um campo podem então ser convertidas em sinais elétricos e processadas por um circuito externo de forma imediata.
Os sensores típicos são formados por finas tiras de filme metálico depositadas num chip, conforme mostra a figura 1.
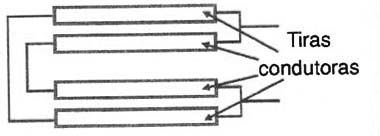
Essas tiras são depositadas por um processo de litografia consistindo basicamente em Permalloy (Liga de Níquel com ferro na proporção de 81% de níquel para 19% de ferro).
O chip é fabricado num wafer de silício oxidado.
A resistividade do material muda pelo efeito magnetorresistivo. Conforme mostra a figura 2, o campo Hy faz com que ocorre uma mudança da magnetização das tiras depositadas.
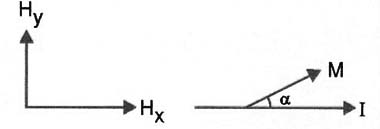
Como a resistividade R de uma tira de permalloy depende do ângulo entre a magnetização M e o sentido de circulação da corrente (I) a mudança do campo altera a resistência final da tira.
A variação da resistência obtida num sensor desse tipo é muito baixa, da ordem de 2 a 3% para a permalloy, o que exige circuitos sensíveis para operar com esse tipo de sensor.
As variações da resistência também dependem das dimensões geométricas das tiras e a anisotropia magnética da permalloy. Isso torna esse tipo de sensor normalmente não linear.
Assim, se for necessário operá-lo com uma característica linear um recurso consiste em se usar a geometria denominada “Barber Pole”.
O que se faz neste caso, conforme mostra a figura 3, consiste em se cobrir as tiras com barras de alumínio inclinadas de 45º .
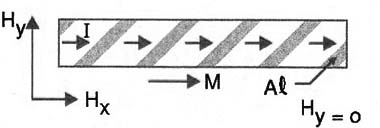
O alumínio possui uma baixa resistividade em relação à permalloy o que faz com que a direção da corrente mude, ficando deslocado de 45º.
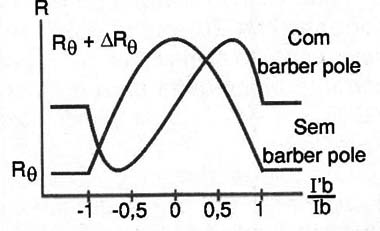
O resultado é que se obtém uma com isso uma característica muito mais próxima da linear, conforme mostram as curvas comparativas na figura 4.
Na Prática
Num sensor comum, as tiras do chip magnetorresistivo são dispostas de modo a formar um padrão bem definido, conforme mostra a figura 5.
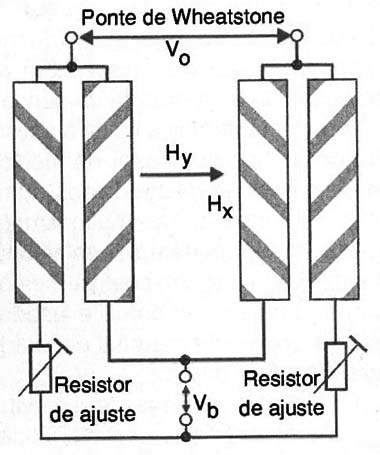
Elas formam uma Ponte de Wheatstone de tal modo configurada que não apenas as resistências elétricas são levadas em conta, mas também a ação dos campos magnéticos externos em cada uma delas.
Cada metade da ponte consiste em dois resistores com orientações diferentes para os Barber Pole. As tensões entre os resistores muda com a aplicação de um campo magnético.
Eles são dispositivos de tal modo que, quando a resistência de um aumenta, a resistência do outro diminui, sob a ação do mesmo campo.
A outra metade da ponte permite aumentar ainda mais a diferença de tensão obtida entre esses dois resistores.
Na prática os sensores são ajustados cuidadosamente no processo de fabricação de modo a se obter uma tensão nula de saída quando nenhum campo magnético é aplicado.
Utilização e Parâmetros
O formato das tiras e a anisotropia da permalloy apenas define um eixo segundo o atual ocorre a magnetização sem a presença de um campo externo.
Isso significa que, nessas condições uma tira pode ter diferentes orientações para magnetização ou domínios magnéticos o que faz com que sua operação seja instável.
Assim, para que o sensor possa ser usado de forma conveniente é aplicado campo magnético auxiliar externo Hx. Esse campo define a orientação da magnetização.
Assim, a faixa Hy de campos em que o sensor tem uma operação segura é determinada pela intensidade do campo auxiliar Hx. Pode-se então definir uma Área de Operação Segura ou (SOA – Safe Operating Area) para o sensor, conforme mostra a figura 6.
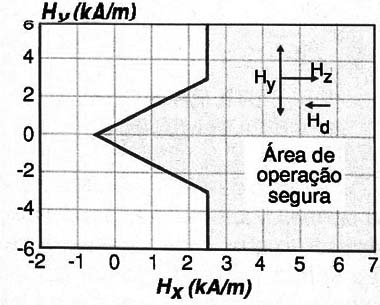
O campo Htot = Hy + Hx determina os valores permitidos de Hy.
Para criar o campo auxiliar utiliza-se normalmente um pequeno imã permanente. No entanto, existem sensores em que esse imã já é incorporado.
Nas folhas de dados desses componentes, o comportamento da ponte de Wheatstone é referenciado a uma tensão de entrada Vb = 1 V, já que nesta região temos uma relação linear entre a tensão de entrada e a tensão de saída.
A sensibilidade S (dada em mV/V/kA/m) de um sensor desse tipo é definida como o deslocamento da tensão de saída em função da intensidade do campo externo para a faixa de -1 kA/m < Hy < 1 kA/m.
Esse parâmetro depende tanto da geometria das tiras como também do campo auxiliar.
Na figura 7 mostramos as características típicas do sensor ZMY20/ZMZ20 da Zetex.
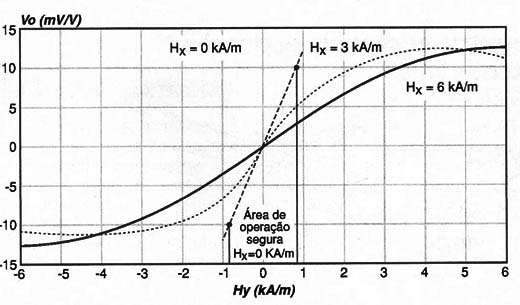
Observe que a área de operação segura é bastante estreita, caso em que se obtém também a maior sensibilidade.
A ponte de Wheatstone é balanceada sem a aplicação de um campo externo. Neste caso, a tensão de saída do sensor é próxima de zero em temperatura ambiente. No entanto, essa tensão na prática não é zero devido à precisão do processo de fabricação.
A tensão de offset (offset voltage) ou Voff/Vb de um sensor é uma indicação desse desvio.
Também deve ser considerado que, com as variações de temperatura, a ponte não pode compensar a tensão offset. Assim, deve ser indicado o coeficiente de temperatura da tensão de offset do sensor ou TCVoff.
Esse parâmetro diz de quanto varia a tensão de offset com as variações da temperatura do sensor.
Essa característica limita a aplicação desse tipo de sensor na medida de campos magnéticos fracos numa faixa de temperaturas muito ampla.
Dois sensores podem ser selecionados de modo a terem coeficientes de temperatura semelhantes e usadas as diferenças de tensão de saída para essa finalidade.
Uma outra maneira de se evitar o deslocamento das características por offset consiste em se usar bobinas para gerar o campo auxiliar. O campo pode ser invertido e com isso a tensão do sinal de saída.
Outras características desse tipo de sensor são a histerese da tensão de saída e a faixa máxima de tensões de saída.
No caso da histerese ela ocorre pelo fato da magnetização das tiras do sensor não ser uniforme. Permanecem áreas.principalmente nos cantos das tiras onde a magnetização é alterada e com isso não responde da maneira esperada aos campos externos.
Aplicações Práticas
Um circuito típico de aplicação, sugerido pela Zetex, é mostrado na figura 8.
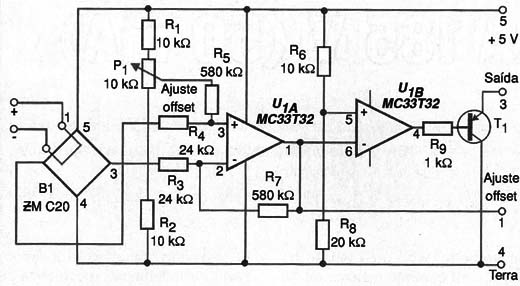
Esse circuito usa um sensor de corrente ZMC20 e uma aplicação típica consiste numa chave de sobrecorrente usada para proteger IGBTs em sistemas de alimentação de motores.
O circuito tem um tempo de reação de apenas 3 us, impedindo que o circuito atua sob condições de transiente.
O ajuste externo feito num trimpot de 10 k é feito para compensar o offset. A tensão de alimentação é 5 V e o consumo é de 10 mA. A saída é feita através de um transistor com coletor aberto capaz de fornecer uma corrente de 1 A num circuito de 20 V.
Um outro circuito aplicativo interessante é mostrado na figura 9.
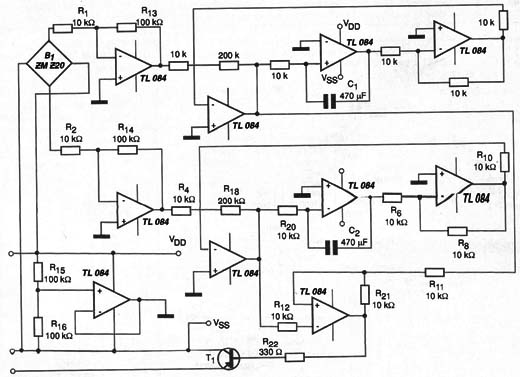
Esse circuito consiste numa solução interessante para a medida de rotações, usando um campo magnético modulado devido a presença de um dente numa engrenagem ou outra peça.
O circuito fornece em sua saída um sinal que é proporcional a velocidade de rotação do dente usado como sensor e permanece no nível alto quando o sistema está parado.
Conclusão
Para os projetos atuais de circuitos que façam uso deste tipo de sensor, o leitor pode contar com uma grande quantidade de componentes.
O importante para os leitores é conhecer o seu princípio de funcionamento para que possam dimensionar corretamente os elementos do circuito e também o modo como vão funcionar.
Muitos sensores modernos já são projetados para terem incorporados os circuitos de processamento capazes de fornecer saídas digitalizadas, o que simplifica bastante um projeto.
No entanto, para o profissional da manutenção é sempre importante lembrar que num equipamento mais antigo ele pode encontrar as primeiras versões desses sensores e por isso deve saber como trabalhar com eles para poder realizar um reparo, ajuste ou ainda detectar uma falha.





