










Descrevemos a montagem de uma chave biestável que pode servir de base para o desenvolvimento de diversos tipos de controles de automatismos a partir de sensores com ação liga-desliga sem repiques. Com a alteração dos valores dos componentes, as aplicações são ilimitadas e a montagem em matriz de contactos tem um excelente aspecto didático, além de servir para que o próprio leitor faça as alterações dos valores dos componentes, experimentando os que melhor preencham suas necessidades de projeto.
Um circuito biestável tem uma ação tipo liga-desliga. Em outras palavras, com um pulso de comando na entrada ele liga uma carga e com o pulso seguinte desliga.
Trata-se de uma configuração de grande utilidade para a mecatrônica, pois ela pode ser usada em diversos tipos de automatismos que façam uso de sensores de contacto momentâneo como micro-switches, reed-switches, sensores de toque, sensores de luz e até mesmo circuitos comandados por microprocessadores e pela porta paralela do PC.
Dentre os automatismos que podem ser desenvolvidos com base no circuito que descrevemos podemos citar os seguintes:
Sensores de batidas ou obstáculos para robôs
Comandos remotos do tipo liga-desliga
Alarmes
Chaves de fim de curso
Inversores de sentido de rotação para motores de corrente contínua
Sistema de iluminação por toque
Na versão básica, usamos um sensor tipo reed de alarme (Metaltex) e dois LEDs indicadores com a programação de tempo para facilitar as demonstrações.
Assim, num toque, o LED1 acende por alguns segundos ao mesmo tempo em que o LED2 é comutado (se estiver aceso, ele apaga e se estiver apagado acende).
No toque seguinte novamente temos o acendimento do LED1 e a comutação do LED2. Como carga para o relé, o leitor pode usar outros dispositivos.
Evidentemente, com alteração de valores de componentes e montagem posterior numa placa de circuito impresso, o leitor poderá ter a versão definitiva para a aplicação desejada.
Como Funciona
O coração do projeto é o circuito integrado 4013 que consta de dois flip-flops tipo D, com a configuração mostrada na figura 1.

No nosso projeto usaremos apenas um dos flp-flops, de modo que o leitor pode usar o outro em aplicações semelhantes ou diferentes.
Numa montagem definitiva, em que apenas um dos flip-flops seja usado, é interessante aterrar todos os pinos não usados do flip-flop não utilizado para evitar instabilidades de funcionamento. Isso implica no aterramento dos pinos 1 a 6.
Um dos problemas que existe no acionamento de um flip-flop ou qualquer outro dispositivo de comutação é o chamado repique dos contactos do sensor.
O que ocorre é que, quando o sensor é fechado não há uma variação única de corrente nos seus contactos mas sim uma vibração que produz diversos pulsos, antes que ele se estabilize.
Assim, esses pulsos podem fazer com que o dispositivo comutador interprete sua ação como diversas aberturas e fechamentos de contactos, conforme mostra a figura 2.
")
A solução para o problema consiste num circuito que trave por alguns instantes no primeiro pulso, de modo que os demais não sejam contados, conforme mostra a mesma figura.
Esse circuito é o chamado anti-repique ou debounce que, no nosso projeto é elaborado com um circuito integrado 555 ligado na configuração monoestável.
Quando sua entrada (pino 2) é aterrada por um instante, a saída vai ao nível alto por um intervalo de tempo determinado por R2 e C1. Nesse intervalo, o LED1 é mantido aceso.
No projeto original o LED ficará aceso por aproximadamente 2 segundos, mas o leitor pode mudar de acordo com a aplicação. Tempos menores são preferidos para as aplicações com sensores de robôs, caso em que C2 deve ter valores entre 47 nF e 100 nF.
O resistor R1 determina a corrente no sensor. Para sensores tipo liga-desliga como microswitches, reed-switches, sensores de contacto, etc, os valores recomendados estão entre 10 k e 47 k.
Para sensores resistivos como um LDR, deve-se usar um resistor de 100 k Ω em série com um trimpot de 2,2 M Ω para se fazer o ajuste de sensibilidade.
A saída do circuito consiste numa etapa com um transistor acionando um relé. O tipo de relé usado depende da carga que vai ser controlada.
O relé sugerido no projeto é para 2 A e aciona simplesmente o LED2.
Os outros dois contactos do mesmo relé podem ser usados para controlar um circuito externo.
Montagem
O circuito completo do Biestável para Sensores é mostrado na figura 3,

A disposição dos componentes para a versão básica é mostrada na figura 4.

Veja que pequenas variações para essa disposição são perfeitamente normais, dependendo dos componentes usados. O relé, por exemplo, pode ter disposição de terminais diferente da indicada.
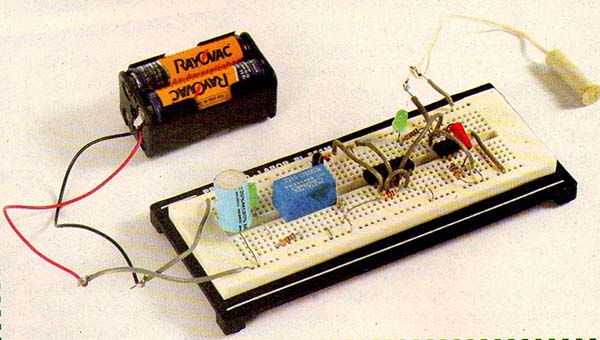
A foto mostra a montagem final usando um sensor tipo reed de alarme.

A aproximação de um imã deste sensor provoca o disparo do circuito.
Na montagem observe com cuidado a posição dos circuitos integrados, do diodo, do transistor e a polaridade dos LEDs.
A alimentação pode ser feita com 4 pilhas comuns (AA) ou fonte. Lembre-se que o consumo maior vai ocorrer quando o relé estiver energizado, ou seja, com LED2 aceso.
Prova e Uso
Para testar o aparelho, basta conectar o suporte de pilhas à matriz observando sua polaridade.
Aproximando e afastando um imã do sensor, conforme mostra a figura 3, o LED1 deve acender por alguns segundos e o relé comutar. Se LED2 estava aceso, ele apaga e se estava apagado acende.
Aproximando e afastando o imã novamente, o LED1 acende por alguns segundos e o relé comuta novamente.
Uma possibilidade interessante para se eliminar o relé da montagem, caso em que pequenas cargas alimentadas pela mesma tensão da bateria forem controladas, consiste no uso de um transistor Darlington de potência, conforme mostra a figura 6.

Esse circuito pode controlar cargas até 1,5 A, devendo o transistor ser montado num radiador de calor.
Na condição de relé desenergizado e LEDs apagados, o consumo do circuito é muito baixo, da ordem de 1 mA.
Consumo menor ainda pode ser obtido com o uso da versão CMOS do circuito integrado 555.
Observamos que o circuito também pode ser alimentado por uma tensão de 12 V, bastando para isso usar um relé para essa tensão.
CI-1 – 555 - circuito integrado – timer
CI-2 – 4013 – circuito integrado CMOS - Flip-flop tipo D
Q1 – BC548 – transistor NPN de uso geral
D1 – 1N4148 – diodo de silício de uso geral
LED1, LED2 – LEDs comuns de qualquer cor
Resistores: (1/8 W, 5%)
R1 – 10 k Ω – marrom, preto, laranja (*)
R2 – 100 k Ω – marrom, preto, amarelo (*)
R3, R5 – 560 Ω – verde, azul, marrom
R4 – 1,2 k Ω – marrom, vermelho, vermelho
Capacitores:
C1 – 2,2 µF – eletrolítico – qualquer tensão acima de 6 V (*)
C2 – 33 0 µF – eletrolítico – qualquer tensão acima de 6 V
Diversos:
X1 – sensor (magnético, microswitch, etc.) (*)
K1 – Relé de 6 V x 100 A
B1 – 6 V – 4 pilhas comuns ou fonte
Matriz de contactos, suporte de pilhas, fios, etc.





