Na edição passada(*) demos como artigo de fundo um interessante controle remoto para caixas de redução com 4 canais usando raios infravermelhos. Ideal para pequenos ambientes, aquele controle remoto, entretanto, não serve para aplicações em que existam obstáculos entre o transmissor e o receptor. Para estes casos sugerimos a versão por sinais de rádio, que é justamente a que apresentamos neste número. Com 50 metros de alcance e de 4 a 10 canais de controle, esta versão pode ser facilmente adaptada em brinquedos, robôs, sistemas mecânicos de automação e em muitos casos que quem acompanhou as duas edições passadas já deve estar familiarizado.
Já afirmamos várias vezes que controles remotos podem ser elaborados de muitas maneiras e, com frequência, publicamos projetos que envolvem as mais variadas técnicas. Assim, na edição passada demos a. versão de controle por radiação infravermelha, aplicado à caixas de redução que movimentam veículos de brinquedo ou outros automatismos.
Visando ampliar a gama de aplicações das caixas de redução voltamos a um controle remoto, mas com nova técnica de transmissão. Trata-se agora de um Radio controle que opera em torno de 72MHz com um alcance de aproximadamente 50 metros em campo aberto e que pode atuar até sobre 10 canais.
Com este sistema podemos ativar ou desativar um motor (2 canais) ou então fazê-lo girar num sentido ou noutro (mais 2 canais), na versão básica. Lendo os dois artigos principais das Revistas anteriores, em que tratamos tanto das caixas de redução como dos controles, você poderá facilmente ampliar a faixa de controle para 10 canais sem modificar quase nada no projeto original.
Com isso, dependendo da aplicação, podemos ter alterações como por exemplo o controle simultâneo de duas caixas de redução ou mais, a inversão de sua rotação de modo independente ou simultâneo e até o acionamento de dispositivos paralelos como solenoides, lâmpadas, sirenes e outros.
O nosso projeto é indicado na versão básica para o veículo que aparece na capa da revista Eletrônica Total n° 11, que é um protótipo movido por duas caixas de redução, alimentado por pilhas e totalmente de plástico, montado pelo nosso modelista José Franci Jr. Naquela Revista você terá diversos aspectos da parte mecânica do veículo que não repetiremos nesta edição. Nela também será encontrado o princípio de funcionamento do sistema de propulsão, além de muitas outras aplicações que, com este controle remoto, passam a ser controladas à distância. O artigo, pois, concentrar-se-á na parte eletrônica do projeto, que consiste num Radio controle multicanal de acionamento sequencial. As características do sistema de Radio controle são:
a) Transmissor
— Alimentação: 6V
— Tipo de modulação: em tom
— Número de transistores: 3
— Alcance aproximado: 50 metros
b) Receptor
— Alimentação: 6V
— Número de canais: 4 a 10 (programáveis em sequência)
— Semicondutores: 5 transistores e dois integrados
— Frequência de operação: aproximadamente 72MHz — Sistema de recepção: super-regenerativo
COMO FUNCIONA
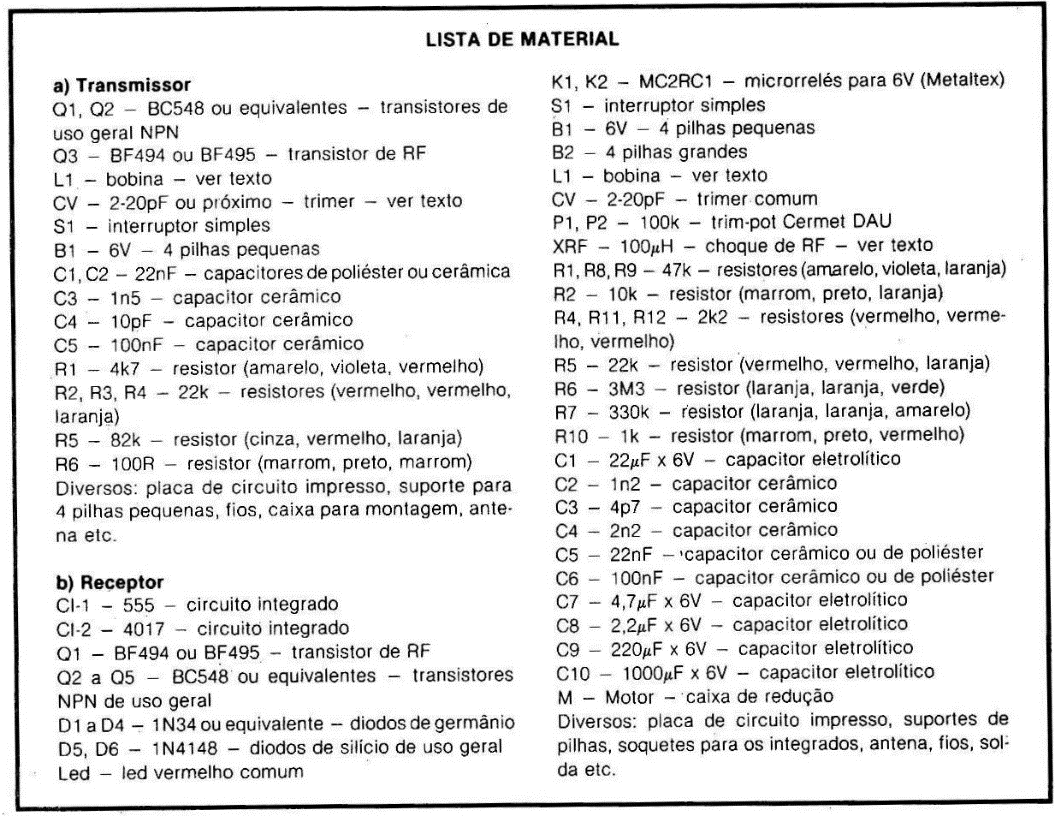
Começamos por explicar o princípio de funcionamento do transmissor, cujo diagrama em blocos é mostrado na figura 1.
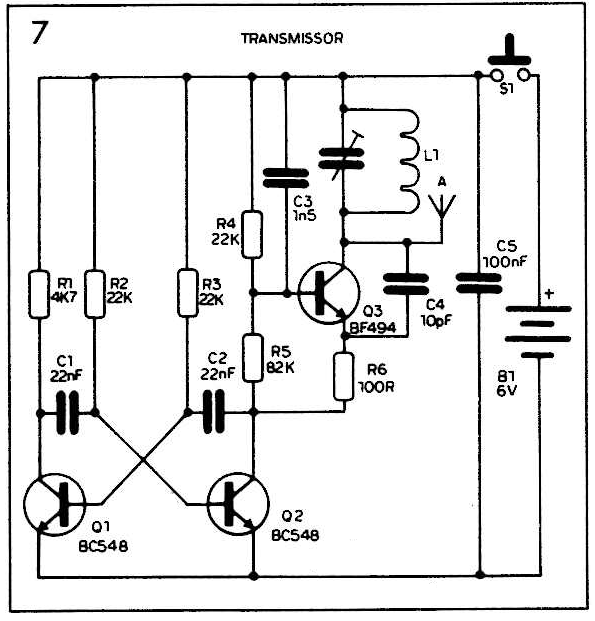
O sinal de alta frequência é gerado por um transistor de RF BF494 ou BF495 que opera como oscilador e cuja frequência é dada por L1 e CV. Em CV temos o único ajuste do transmissor, para que seu sinal caia num ponto livre da faixa utilizada.
Neste circuito R4 e R5 polarizam a base do transistor e C4 proporciona a realimentação, que mantém as oscilações.
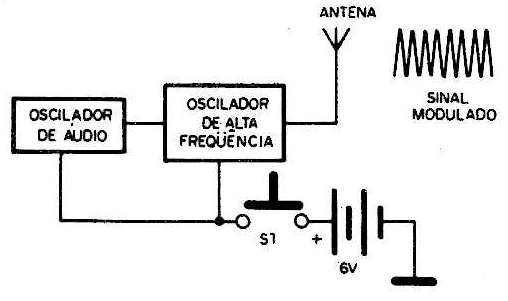
O sinal gerado é irradiado a partir de uma antena que, em princípio, pode ser ligada diretamente ao coletor do transmissor. Esta antena é uma simples vareta de aço ou fio rígido de até 30cm de comprimento. Podemos aumentar o alcance do transmissor de modo sensível com uma antena maior, mas como ela representa uma carga que poderá gerar instabilidades ao oscilador, será interessante fazer sua ligação em uma tomada da bobina L1, determinada de modo experimental, para que a influência da aproximação da mão em relação a antena seja a menor possível (figura 2).
O sinal irradiador é modulado por um tom de baixa frequência, gerado por um multivibrador astável com dois transistores (Q1 e Q2). A frequência deste multivibrador é dada basicamente pelos capacitores Cl e C2 e não é crítica.
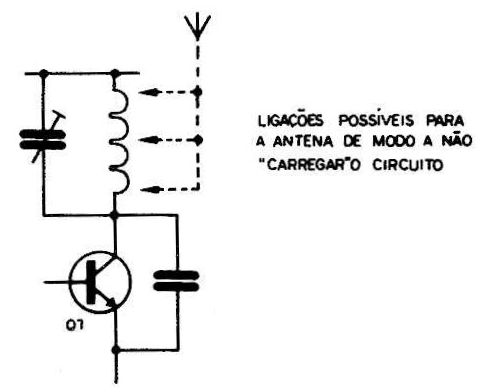
Para o acionamento do transmissor existe um interruptor de pressão (botão de campainha). Conforme veremos mais adiante, é a emissão de uma sequência de pulsos que determinará a função a ser acionada no receptor. O sistema receptor tem sua estrutura em blocos mostrada na figura 3.
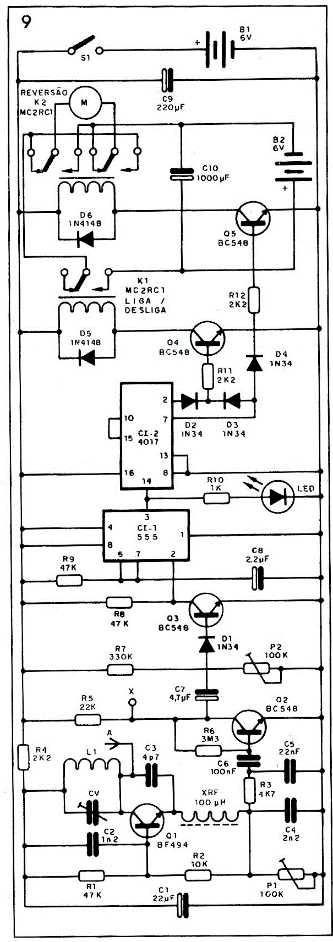
Começamos com o detector super-regenerativo, montado em torno de Q1, cuja função é receber os sinais emitidos pelo transmissor. Uma característica deste tipo de circuito receptor é a sua simplicidade aliada à sensibilidade. No entanto estes receptores não são muito seletivos, o que limita suas aplicações a pequenos controles remotos e intercomunicadores.
A frequência de recepção é determinada por L1 e CV, que deve ser ajustado para a frequência do sinal emitido pelo transmissor. Quando o ajuste é feito e P1 levado ao ponto de maior sensibilidade, o circuito torna-se um oscilador de operação crítica. Sua operação ocorre quando o sinal é recebido pela antena e, com isso, uma enorme amplificação acontece, num processo de regeneração.
Como o que nos interessa é o sinal de áudio que modula o transmissor, a separação é feita em XRF, um choque de radiofrequência ligado ao emissor do transistor. Este componente bloqueia a componente de alta frequência e deixa passar para um filtro (em PI) formado por C4, C5 e R3 o sinal de baixa frequência, ou seja, a modulação. O sinal de áudio ou modulação é então amplificado por duas etapas, formadas pelos transistores Q2 e Q3. Na base de Q3 temos um circuito de retificação, que tem seu ponto de maior sensibilidade ajustado em P2.
Fazemos então com que P2 seja ajustado de tal forma que, com a ausência de sinal, a tensão no coletor de Q3 seja muito próxima, porém inferior a 2/3, da tensão de alimentação, que é a tensão de disparo da próxima etapa do circuito, um monoestável com o 555. Desta forma, quando o sinal é detectado e aparece uma componente de baixa frequência na base de Q3, ela é captada e faz com que a tensão no pino 2 do 555 caia, disparando-o.
O resultado é a produção de um pulso de curta duração, dado pelo resistor R9 e C8, que ativa a etapa seguinte, um contador com base no 4017. Na figura 4 temos as formas de onda dos sinais obtidos até este ponto do circuito.
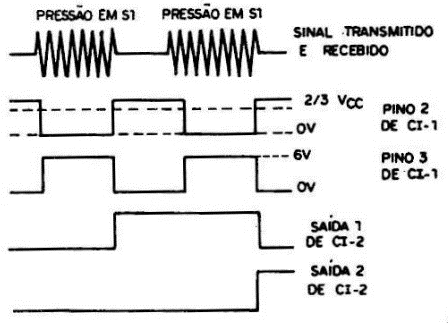
Na versão básica, o 4017 é ligado de modo a termos 4 saídas utilizadas. Em repouso, na condição inicial, a primeira saída (que está desligada) se encontra no nível alto de tensão (+ 6V), enquanto as demais se encontram no nível baixo (0V).
Quando um primeiro pulso é detectado pelo circuito e aparece na saída do 555, ele muda a condição da saída do 4017. A sua primeira saída é desativada, passando ao nível baixo (0V) ao mesmo tempo que a segunda passa ao nível alto (+ 6V). Mesmo quando o pulso de controle desaparece esta saída se mantém com a tensão positiva.
Como nesta saída existe um transistor de acionamento de relé ligado, o relé é energizado, fechando seus contatos. É a ativação do primeiro comando do sistema. Num pulso seguinte, a segunda saída passa ao nível baixo (0V), enquanto a terceira é quem vai ao nível alto. Estando desligada, nada ocorre, a não ser o desativamento do relé conectado à saída anterior.
Num outro pulso, temos a passagem da terceira saída ao nível baixo, enquanto a quarta vai ao nível alto, o que faz com que um segundo relé ligado a ela seja acionado por um transistor. É o segundo comando possível. Com a ajuda de diodos podemos fazer com que nesta quarta saída tenhamos agora o acionamento de dois relés em lugar de um, conforme mostra a figura 5.
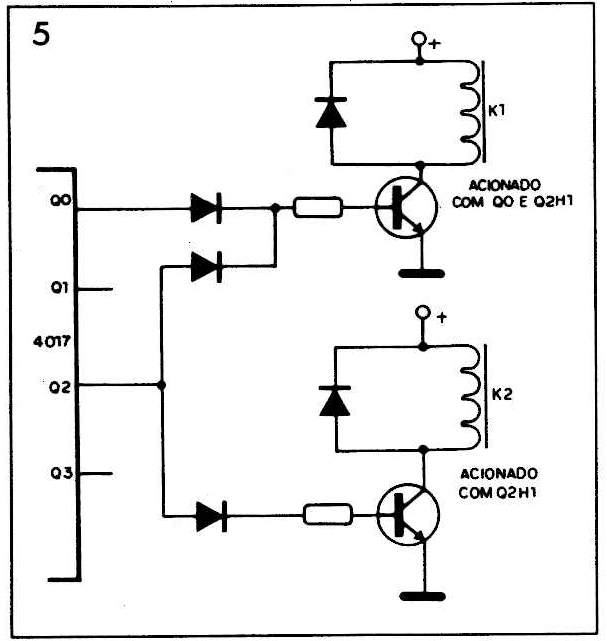
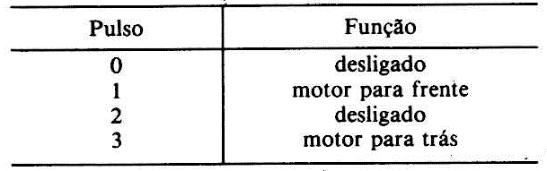
Veja então que se usarmos o primeiro relé para acionar o motor e o segundo para inverter a sua rotação, temos uma tabela de possibilidades de controle muito prática.
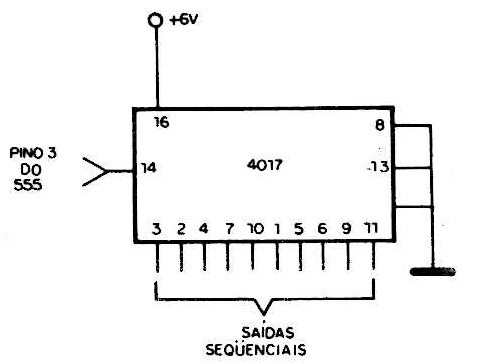
No quinto pulso obtemos a volta do sistema à saída 1, em nível baixo, e tudo pode ser comandado da mesma forma, na mesma sequência. Na figura 6 temos a maneira de se ligar o 4017 para que tenhamos 10 saídas, em lugar de 4, acionadas em sequência.
Veja que a alimentação do motor da caixa de redução controlada é separada do circuito receptor. Isso é necessário porque as escovas de comutação do motor geram forte ruído de rádio que poderia interferir no acionamento do circuito.
Um capacitor de 1000 µF em paralelo com a alimentação do motor é recomendado, a fim de amortecer a interferência.
MONTAGEM
Na figura 7 temos o diagrama completo do transmissor, que será alojado numa caixa plástica do tamanho aproximado de uma saboneteira. O transmissor também poderá ser alimentado com bateria de 9V, caso em que podemos usar até uma caixa menor.
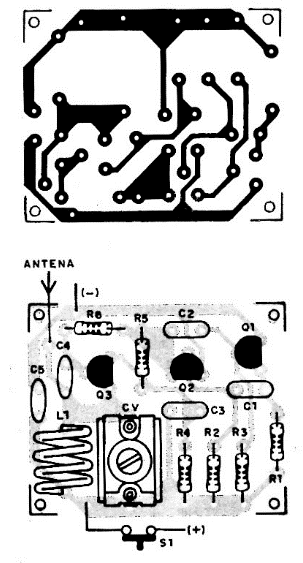
A placa de circuito impresso do transmissor é mostrada na figura 8.
A bobina L1 é formada por 4 espiras de fio rígido com diâmetro de 1 cm sem núcleo. O trimmer tanto pode ser de plástico como de porcelana e seu valor não é crítico, podendo ficar em torno de 2 — 20pF. Os capacitores C1 e C2 podem ser de poliéster, cerâmica ou styroflex, mas para os demais os tipos cerâmicos são os recomendados. Os resistores são todos de 1/8 ou 1/4W.
Para Q3 podemos usar transistores do tipo BF494 ou 131-495 ou até mesmo tipos como os BF254 ou BF184. A antena consiste num pedaço de fio rígido ou vareta de aço de 15 a 30cm de comprimento. Para acionamento usamos um interruptor de pressão comum NA. O diagrama completo do receptor é mostrado na figura 9.
Utilizamos uma placa de circuito impresso do tipo universal com padrão de matriz de contatos para esta montagem. Você precisará ter muita habilidade a fim de concentrar os componentes, principalmente no setor do receptor de alta frequência, em torno de Q1 e Q2. Na figura 10 temos a disposição dos componentes para esta placa.
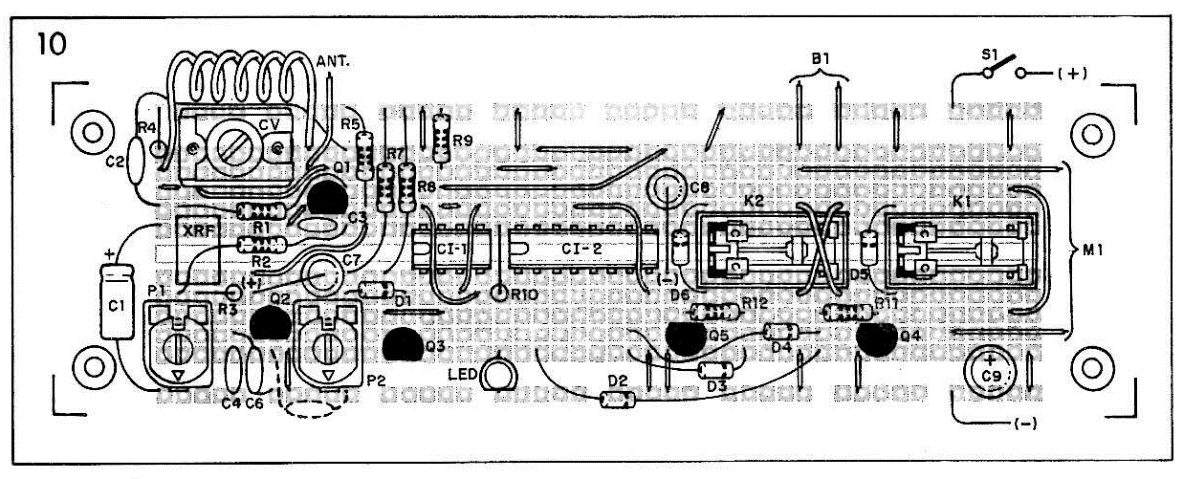
Observe que o setor do 555 e do 4017, assim como dos reles, são idênticos ao da placa de controle da edição anterior, em que usamos um acionamento por infravermelhos.
O trimmer usado é do tipo de plástico, de menores dimensões, e a bobina tem seus terminais soldados por cima da placa, nos próprios terminais deste trimmer. Esta bobina é igual à do transmissor, constando de 4 voltas de fio comum rígido (22AWG) em diâmetro de 1 cm sem núcleo. Os trimpots são de ajuste, miniatura, (Cermet) da DAU, que, por suas dimensões, são os indicados para este tipo de montagem.
O choque XRF pode ser do tipo comercial de 100HF ou, na sua falta, enrole 50 voltas de fio esmaltado fino (32AWG) num resistor de 100k x 1/4W, ligando os extremos da bobina aos terminais do resistor. C2 e C3 devem ser cerâmicos, mas os demais podem ser de poliéster ou cerâmica, com exceção de C1, C7, C9 e CIO que devem ser eletrolíticos.
Os reles são micro reles de 6V (Metaltex) e, em paralelo com suas bobinas, são ligados diodos de silício de uso geral 1N4148 ou equivalentes. Os demais diodos devem ser de germânio, como o 1N34 ou 1N60.
Se você quiser uma disposição menos concentrada no setor de recepção pode planejar uma nova placa ou então usar uma segunda placa de padrão universal. No protótipo os integrados foram soldados na própria placa, mas nada impede que sejam usados soquetes, o que facilitaria muito o trabalho em caso de substituição.
Nesta placa, devido à limitação de espaço, o capacitor C5 foi soldado pelo lado cobreado, mas isso não causa qualquer problema ao seu funcionamento. A antena receptora consiste num pedaço de fio rígido de até 30cm de comprimento soldado no terminal do trimer que vai ao coletor do transistor. Outro ponto favorável de ligação para a antena é no emissor do transistor.
Existem dois tipos de jumpers na placa: os que são diretos e podem ser feitos com pedaços de fios descascados, ou mesmo pedaços de terminais de resistores e capacitores que já tenham sido soldados, e os mais compridos, que são feitos com pedaços de fios encapados. O máximo de cuidado deve ser tomado na soldagem dos terminais dos componentes e dos jumpers, para que espalhamentos de solda não atinjam trilhas vizinhas a que se deseja conectar, provocando curtos-circuitos. Use um ferro de soldar de ponta bem fina.
Para as pilhas é usado um suporte comum e o interruptor é opcional, pois podemos desligar a unidade simplesmente retirando as pilhas do suporte.
AJUSTES E USO
Para comprovar o funcionamento do transmissor é muito simples, pois aproximando-o de um receptor de FM fora de estação poderemos ouvir um apito quando apertarmos S1. Para o receptor será interessante contar com um amplificador de áudio ou então um fone de cristal, que será ligado no ponto X do diagrama, conforme mostra a figura 11.
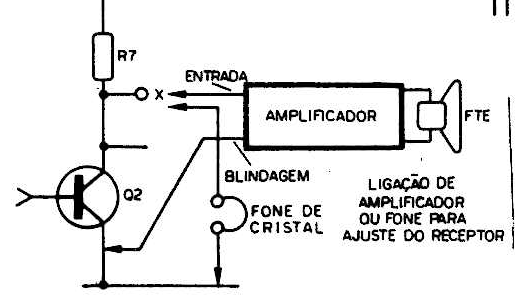
Ligando o receptor e ajustando inicialmente P1 deveremos encontrar um ponto em que não haja oscilação, mas simplesmente um leve chiado, indicando a captação de sinais. Se existirem estações que operem na faixa, você poderá até captá-las. Não será difícil que, abrindo o trimmer, você escute no fone ou amplificador o sinal de alguma estação de FM no inferior desta faixa (entre 88 e 90MHz). P2 deverá estar na posição que mantém o led inicialmente apagado.
Uma vez que o receptor esteja ligado e P2 colocado na posição de regeneração favorável, como dito acima, apertamos o botão do transmissor a uma distância de 2 a 3 metros e vamos girando CV até captar seu sinal mais forte. Será interessante que o ajuste também seja feito em CV do transmissor, caso haja dificuldade em captar este sinal.
Uma vez o apito captado, afaste-se com o transmissor para verificar se não foi captado uma harmônica (sinal de frequência múltipla mais fraco). Se o sinal "fugir", tente novo ajuste, procurando por um mais forte. Se ainda assim nada conseguir, retire L1 do receptor e diminua inicialmente uma espira. Se isso não for suficiente para se conseguir o ajuste, retire-a novamente e faça nova bobina, agora com 5 espiras.
Quando conseguir o sinal mais forte, vá abrindo P2 com o transmissor ligado até que o led fique prestes a acender. No momento que ele acender volte um pouco ao ajuste e retoque P1 a fim de obter maior sensibilidade. Apertando o interruptor de pressão do transmissor, o led deve piscar e a comutação dos relés deve ocorrer em sequência, como mostrado na tabela.
Teste o alcance do sistema e, se houver necessidade, retoque os ajustes até obter o ponto certo de funcionamento. Comprovado o funcionamento, ligue os motores nos fios correspondentes e verifique se não ocorrem interferências. Retoque o ajuste de P1 para eliminar problemas de interferência, assim como de P2.
Em ambientes sujeitos a rádio interferências geradas por motores elétricos ou máquinas industriais pode ocorrer o disparo errático do controle. Você deve estar atento a estes problemas ao usar o controle remoto. Com os motores ligados e tudo funcionando é . só pensar nas aplicações possíveis.
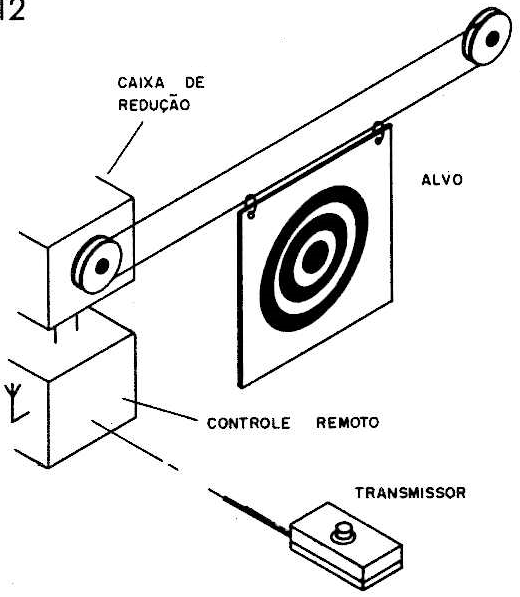
Na figura 12 temos sugestões. Nesta figura temos uma sugestão de movimentação de alvo para a prática de tiro, através do controle remoto. O alvo pode avançar, parar ou voltar, ao comando dos toques no transmissor.
Sugerimos que a consulta às Revistas anteriores a esta (números 11 e 12) para obter mais informações sobre o uso do sistema. Com relação à caixa de redução usada, sugerimos também a leitura dos artigos e a consulta ao anúncio nesta mesma edição.