










Um dos projetos mais tradicionais para se demonstrar a habilidade no uso de sensores de luz de um robô autônomo é a montagem do Robô que segue uma linha clara ou escura no chão. Usando sensores de luz como "olhos robóticos" é possível implementar este projeto de diversas maneiras. Neste artigo, mostramos como fazer isso usando o kit ALFA da PNCA (para mais detalhes sobre os kits leia os artigos da seção Kits PNCA).
Veja mais:
Trabalhando com a imaginação (MEC033)
Olhos de robô (MEC015)
Legal e +Legal - programando o kit ALFA (MEC017)
Robô Zero (MEC012)
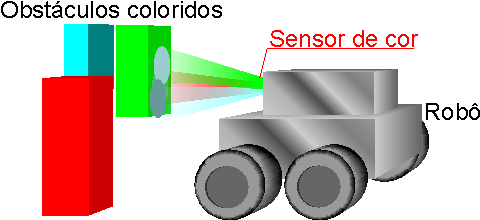
A habilidade de um Robô para se movimentar num determinado meio onde existem obstáculos ou pontos de referência depende do uso correto de sensores. Estes sensores podem ser do tipo "antenas" que acionam chaves ao tocar em objetos, como já descrevemos em outros artigos, ou ainda sensores mais avançados como os tipos ultrassônicos que emitem sinais, cujos ecos permitem a avaliar a distância e posição dos objetos em que eles refletem. Outra possibilidade está o uso de sensores ópticos que são capazes detectar objetos pela luz que refletem ou deixam de refletir ou ainda pela emissão de luz, caso de lâmpadas que podem ser usadas como "faróis" de orientação para o robô em movimento, conforme mostra a figura 1.
A implementação de um robô capaz de seguir uma linha pode ser realizada com base em sensores ópticos como os disponibilizados no kit ALFA, conforme já exploramos no artigo em que tratamos de seus sensores. No artigo "Usando a Imaginação - MEC033" mostramos como é possível elaborar um robô que siga ou fuja da luz usando os sensores de luz. Na figura 2 mostramos este robô.

Figura 2 - Usando os sensores de luz.
Para o caso de um robô que siga uma linha no chão a idéia é posicionar esses sensores de tal forma que eles possam detectar as variações da luz refletida na linha quando se move e em função disso, comandar o circuito de acionamento dos motores.
Assim, o que se faz é desenhar no chão ou usar fita crepe escura (preta) ou mesmo fita isolante, de modo a se obter um contraste de tom que possibilite a detecção pelos sensores do robô, conforme mostra a figura 3.
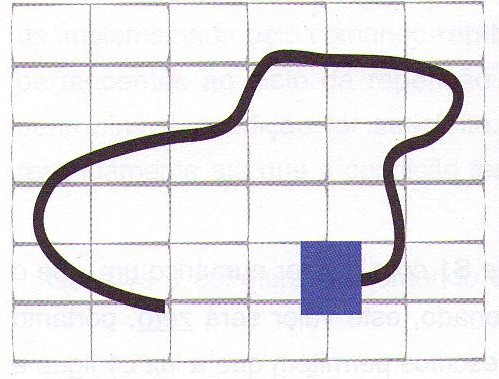
Figura 3 - Implementando a pista com a linha que o robô deve seguir.
O posicionamento dos sensores de modo que eles possam detectar a linha escura, enviando as informações sobre sua posição relativa ao movimento do robô, a central de controle de modo que eventuais correções da trajetória possam ser feitas.
Na figura 4 mostramos como a apostila da PETe que é fornecida às escolas que adotarem o kit ALFA e sua metodologia sugere a construção do robô que segue a linha.
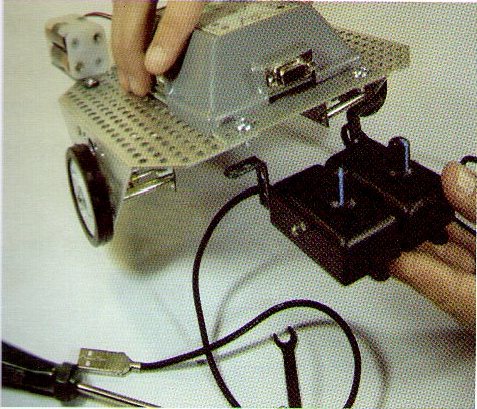
Figura 4 - Posicionando os sensores na parte dianteira do robô.
O Robô pronto, com os sensores devidamente posicionados é mostrado na figura 5.
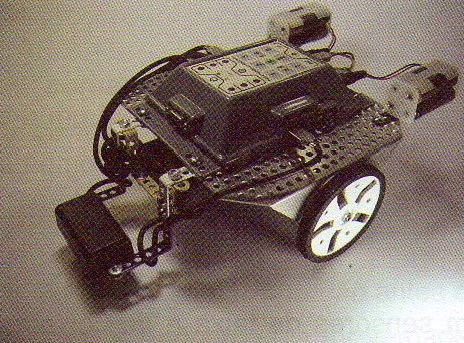
Figura 5 - Robô que segue a linha usando o Kit ALFA pronto.
Observe o posicionamento dos suportes de pilha de modo a contra balançar o peso dos sensores na parte frontal. Este posicionamento é importante devido a colocação da rodinha móvel na parte traseira, conforme mostra a vista do robô por baixo dada na figura 6.
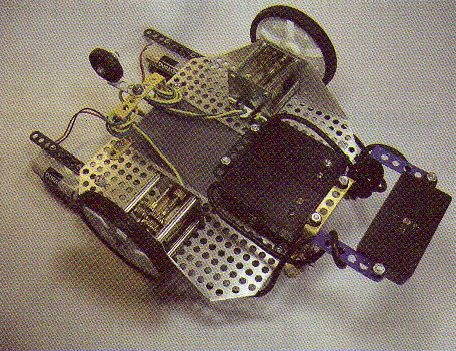
Figura 6 - O robô visto por baixo.
Terminada a montagem deve-se pensar na programação, havendo duas variações possíveis para se seguir a faixa. Uma delas é a que permite seguir uma faixa branca e a outra é a que permite seguir uma faixa preta.
Justamente na programação está a segunda parte do desafio de se montar um robô capaz de seguir uma linha.
Os Temas Transversais
A montagem de um robô capaz de seguir uma linha não serve apenas para demonstrar as habilidade dos alunos de uma disciplina eletiva ou mesmo de um curso técnico em montar e programar robôs autônomos. Mais do que isso, o robô que segue a linha pode ser utilizados em atividades diversas no ensino fundamental e médio.
Assim, podemos associar seu movimento capaz de seguir uma trajetória programada como a do robô Opprtunity que explora a superfície do planeta Marte.
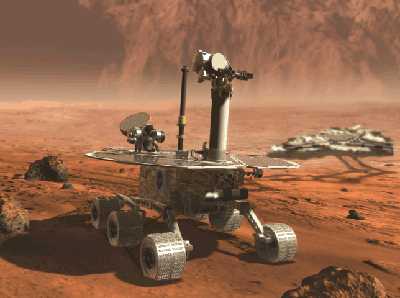
Figura 7 - O Robô Opportunity explorando a superfície do planeta Marte.
Numa demonstração, exposição ou feita pode-se montar o robô que segue a linha simulando o robô explorador e num cenário que imite a superfície marciana colocar uma linha que, desviando das rochas e outros obstáculos será seguida.habilidosamente.
Para os mais avançados pode-se pensar no uso de sensores de cores fazendo com que o robô, num emaranhado de linhas nas cores que o sensor detecta siga apenas uma.
Um exemplo é dado no link abaixo do Youtube em que alunos da Engenharia e Automação da Unilins (SP) construíram robô que segue a pista correspondente a cor da carga. No vídeo ele está seguindo a pista amarela para descarregar a caixinha da mesma cor, retornando depois para a região vermelha, onde esperará por nova carga.
E a EESC da USP/São Carlos também mostra no vídeo abaixo os seus robôs na III SEMATRON - Semana da Mecatrônica em 2009. Apenas uma demonstração do que se pode fazer, principalmente quando se dispõe de mais de um kit para o trabalho com diversas equipes.
É claro que existem outras possibilidades de uso dos sensores de luz na detecção de zonas claras e escuras como, por exemplo, a montagem de uma cabeça móvel com olhos (sensores) que se mova acompanhando uma pessoa que vista uma roupa clara ou ainda uma roupa escura.
Conclusão
A montagem de um robô que segue a linha é algo simples para as escolas que possuam o kit ALFA ou mesmo entusiastas da robótica que desejam fazer seus próprios projetos de modo simples com alto desempenho.
Nos demais artigos desta seção, os leitores poderão ter mais idéias do que pode ser feito, principalmente os educadores que podem adotar o sistema PETe para ensinar robótica em suas escolas.

