










Para aqueles que já tiveram a oportunidade de programar um robô utilizando o Kit Alpha da PNCA utilizando o Legal, puderam notar a facilidade de criar rotinas e tarefas a serem executadas utilizando apenas os sinais ou ícones gráficos que o programa apresenta. Porém, quando era necessário fazer pequenas alterações, ou executar tarefas que exigissem um pouco mais de refinamento, era preciso utilizar meios não convencionais para isto. Pensando nisso, os engenheiros da PNCA criaram o +Legal.
O +Legal tem todas as funções gráficas que existe no Legal, porém é possível modificar as linhas dos códigos que serão compilados e enviados ao módulo.
O intuito da criação do Legal pelos engenheiros da PNCA foi de atender o público que se encontra no ensino fundamental, por este motivo a programação através dos ícones é a porta de entrada para os futuros engenheiros mecatrônicos. Para os alunos do ensino médio a aventura está em poder criar as próprias rotinas, criar variáveis e funções específicas, e essas modificações ou criações só são possíveis quando o futuro engenheiro mecatrônico possa alterar diretamente no código-fonte do programa.
No programa +Legal isso é possível, pois a medida em que os botões acrescentam os comandos no código-fonte, o usuário poderá alterar seus resultados como também a lógica de programação.
Para começar abaixo temos a tela de entrada do +Legal, nele encontramos 4 botões no centro da tela que executam 4 funções:
Programar robô;
Coletar dados;
Terminal;
Controlar dispositivo.
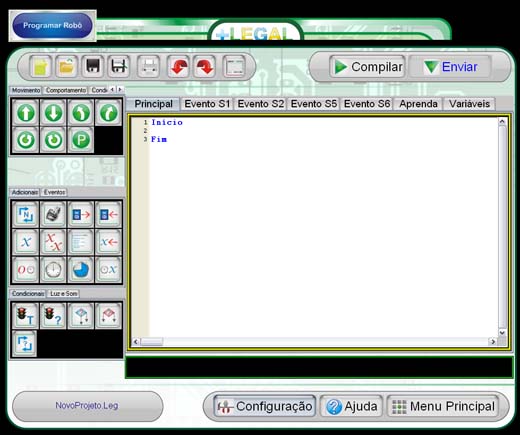
Programar robô
Nesta tela temos no topo os comandos básicos de qualquer programa, como abrir arquivo, salvar, salvar como e imprimir. Estes comando dispensa apresentações.
No canto lateral esquerdo termos as funções de lógica, onde podemos inserir comandos e decisões que o robô irá executar.
Para saber os tipos de comando de cada botão aconselho que veja o ítem "Comandos do +Legal".
No canto superior direito temos os botões "compilar" e "enviar". O botão compilar tem como finalidade fazer uma verificação do código-fonte e gerar um arquivo no formato que o módulo compreenda. Já o botão "enviar" pega o arquivo compilado e envie para o módulo.
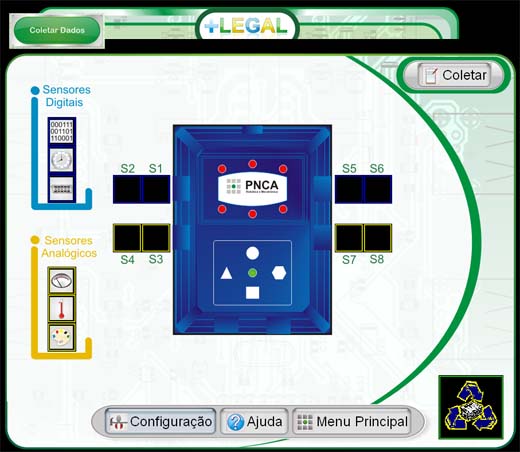
Coleta de dados
Antes mesmo que criar qualquer mecanismo mecatrônico é importante fazer um teste com os sensores que serão utilizados no projeto. Por este motivo devemos testar todos eles utilizando o módulo "Coletar Dados". Nesta tela temos o desenho do módulo, e suas respectivas entradas. Cabe a nós puxar os ícones referentes aos tipos de sinais que o módulo pode esperar e em que porta (S1, S2 ....).
Os sensores podem ser digitais (ligado e desligado) ou analógicos (cores, temperatura e resistivos).
Depois de instalarmos o sensores e informamos ao +Legal o tipos de sinais que ele deve esperar, é só clicar em Coletar e uma nova tela aparece com gráficos em 3 dimensões mostrando o funcionamento dos sensores. para os digitais o gráfico tem 2 estados, mas nos analógicos a visualização do gráfico fica bem interessante. O resultado desta coleta pode ser exportada para uma planilha eletrônica e ser utilizado em sala de aula como material de pesquisa.
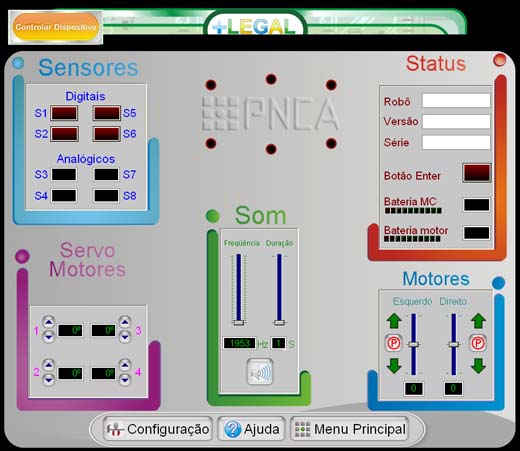
Controlar dispositivos
Assim como no caso dos sensores, é importante fazer também os testes dos mecanismos de saídas, como os motores, os servos e do sistema de som do módulo. Além testar cada um deles, a tela apresenta de forma simples as situações dos sensores, da bateria do módulo e da bateria dos motores, lembrando que para testar os motores é necessário ter as pilhas inseridas dentro do módulo, uma vez que a energia de 5 V fornecida pelo computador, através da conexão USB, não são suficientes.
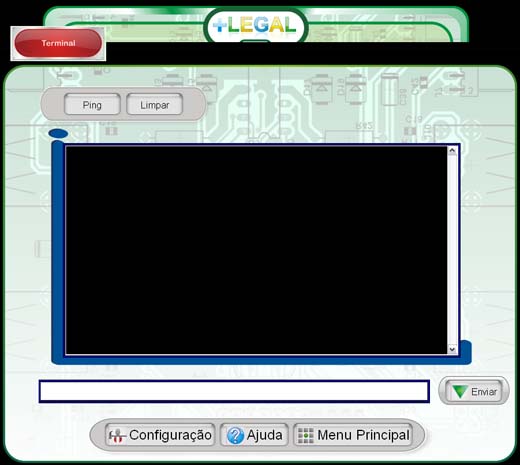
Terminal
Nesta tela os usuários um pouco mais experientes poderão fazer a comunicação do computador e módulo através de linhas de comando. Assim como o hiperterminal do Windows é utilizado para se comunicar com outros computadores e dispositivos. No futuro iremos abordar mais sobre esta tela.
Conclusão
Como é possível ver, o +Legal manteve os recursos do Legal mas com algumas melhorias para os usuários que precisam de mais recursos na hora de programar os seus robôs, dando mais liberdade para os futuros engenheiros mecatrônicos.

