










Um projeto que é uma excelente amostra do que se pode fazer com o Kit Alfa da PNCA é o Robô Zero. Conforme o nome sugere, trata-se do projeto de iniciação em robótica mais avançada onde importantes recursos do kit são colocados à prova. O Robô Zero é uma interessante amostra de como estudos paralelos podem ser realizados como base na robótica, pois ele imita animais, no caso a barata, fugindo da luz. Vejamos como funciona e como montar este projeto didático do kit Alfa que pode ser adotado em sua escola ou ainda pode ser montado por você pare demonstrações ou feiras de ciências.
O Robô Zero consiste no que se denomina Robô Autônomo, ou seja, move-se por conta própria sem a intervenção de um operador humano, como ocorre num robô com controle remoto. Em outras palavras, ele possui “inteligência” para controlar seu movimento e seus atos. Esta inteligência vem de seu Módulo de Controle que é programada para que, ele com base os sensores, se movimente sempre no sentido de fugir da luz. Na figura 1, o robô montado, pronto para entrar em ação.
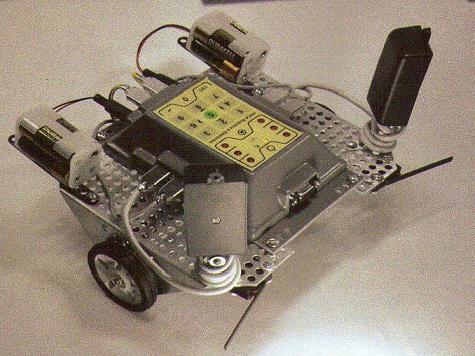
Figura 1 – Observe o Módulo de Controle sobre o robô. Nela está programado seu comportamento.
Os sensores de luz estão nas duas caixinhas pretas frontais que podemos ver na figura 2. Estes sensores são ligados por cabo ao Módulo de Controle. Como todos os dispositivos ligados a central de controle, os sensores são digitais com tempos de resposta de aproximadamente 0,1 segundo o que é apropriado para a maioria das aplicações. O sensor fornece um sinal digital com valores discretos de 0 a 1023 que correspondem aos níveis de luz sensoriados. O dispositivo não é linear, mas sua curva de resposta é adequada a aplicação, já que não se pretende medir a luz mas sim ter uma idéia aproximada de sua intensidade. Veja que para que o robô funcione adequadamente o posicionamento dos sensores é muito importante.
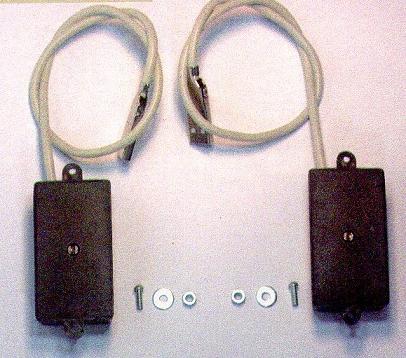
Figura 2 – Os sensores de luz do Kit Alfa com seus cabos de conexão ao Módulo de controle.
Temos ainda dois sensores de toque que são as pequenas antenas laterais que aparecem na figura. Eles servem para indicar a presença de objeto. São sensores do tipo on-off fornecendo bit 0 ou 1 conforme o acionamento. Quando acionados pela presença de um objeto, o robô inverte seu movimento afastando-se do obstáculo. Na figura 3, temos detalhes destes sensores.
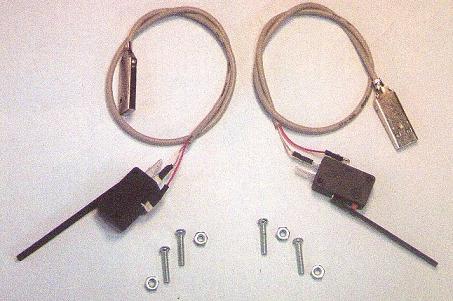
Figura 3 – Os sensores de batida funcionam como antenas, exatamente como no caso de uma barata que usa suas antenas como órgãos de tato.
Além dos sensores externos que vão interfacear o robô com o mundo exterior, ele também possui sensores internos ao Módulo de Controle que verificam o estado das pilhas.
O Projeto
Utilizando sensores de toque e sensores de luz ligados ao Módulo de controle, o Robô Zero usa dois motores para sua propulsão através de rodas laterais. A terceira roda é móvel de modo a possibilitar a liberdade do movimento controlado pelo simples acionamento controlado das rodas propulsoras. Por exemplo, duas rodas acionadas num sentido o robô vai para frente. Rodas acionadas no sentido oposto ele vai para trás. Uma roda ou outra acionada e dependendo do sentido, o robô vai para a esquerda ou direita. Na figura 4, detalhes desta roda e sua fixação na base ou chassi.
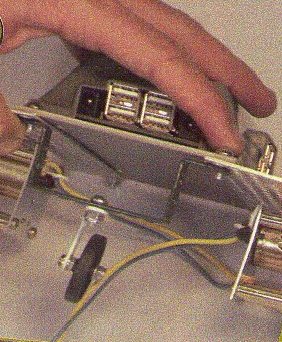
Figura 4– A terceira roda é livre para possibilitar o movimento do robô em todas as direções.
Todas as partes são fixadas de maneira simples utilizando-se uma chave de fenda e um alicate de ponta. Na figura 5 temos a fixação das rodas propulsoras juntamente com o motor.

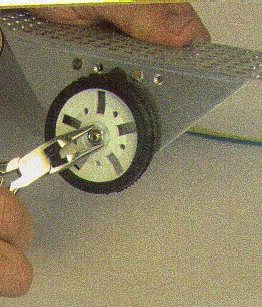
Figura 5 – Fixação do motor e das rodas propulsoras.
O módulo de controle que é o “cérebro” do robô é fixado no chassi por meio de parafusos e porcas conforme mostra a figura 6. Veja que sua fixação é extremamente simples já que os furos do chassi “casam” perfeitamente com os furos deste componente do projeto.
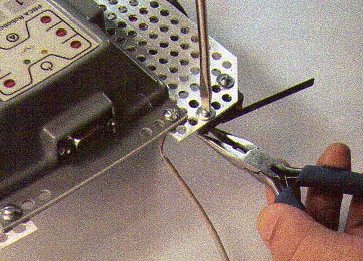
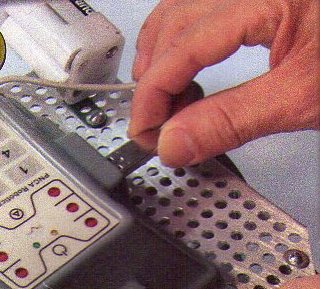
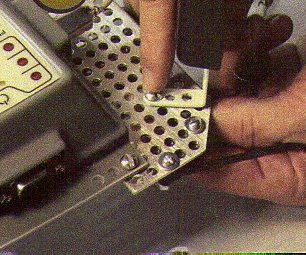
Figura 6 – Detalhes da fixação do Módulo de controle no chassi do Robô Zero.
Programação
A linguagem Legal e +Legal utilizadas pelo Módulo de Controle do Kit Alfa tem todos os recursos que possibilitam a implementação das funções desejadas, ou seja, o comportamento do robô que o faz fugir da luz. Através desta programação são lidas as informações dos sensores momento a momento e comparadas com o programa que então gera os comandos para as rodas que vão determinar a direção e o sentido de seu movimento. Na figura 7 damos uma idéia do ambiente de programação utilizado. Observe que nesta trela inicial escolhemos diversas opções de utilização e os sensores, além dos eventos.
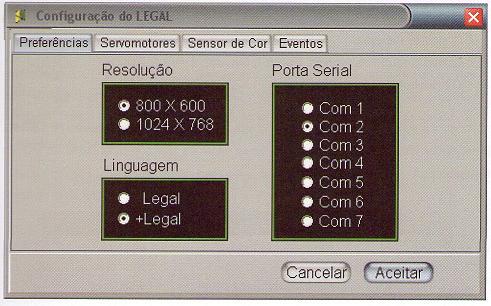
Figura 7 – O ambiente de programação do Legal e do + Legal.
Aplicações Didáticas
Evidentemente é na área de robótica educacional (ensino de tecnologia) que os professores poderão encontrar uma enorme gama de aplicações para este robô e outros projetos que podem ser montados com o kit Alfa. Para o robô Zero, especificamente temos as seguintes sugestões de projetos.
a)Demonstração da fotofobia, que seria a aversão a luz manifestada por insetos como a barata, caso em que basta este robô para fazer isso.
b)Competição para se escolher o robô que atinge uma área escura de um local em primeiro lugar, para as escolas que possuam mais de um kit e possam montar robôs em equipes. Cronometra-se o menor tempo.
c)Inversão da ação do circuito para que o robô encontre uma luz ou a saída iluminada de um labirinto.
d)Robô girassol, onde uma versão estática com uma cabeça simulada contendo os sensores acompanha o movimento do sol durante o dia exatamente como um girassol.
Muito mais os professores podem encontrar no site da PNCA consultando-os diretamente.

