










No projeto de automatismos industriais, robótica ou ainda com finalidades didáticas, um controle de motor de passo é um ponto crítico que deve ser enfrentado pelo técnico, engenheiro ou estudante e que admite diversas soluções. O circuito que apresentamos é bastante simples por usar componentes comuns e pode utilizar drives de diversas faixas de potências os quais serão escolhidos conforme o motor e a aplicação.
Existem muitas formas de se controlar um motor de passo a partir de sinais obtidos de circuitos lógicos ou simplesmente de um pulsador para demonstrações.
O circuito que descrevemos se caracteriza pelo uso de componentes comuns na parte geradora dos pulsos de controle e, além disso, permite que na etapa de potências componentes especiais ou mesmo transistores sejam usados.
Tudo isso significa facilidade de se usar o circuito e ainda de adaptá-lo para aplicações específicas que vão desde o controle de máquinas industriais ou robôs até simplesmente uma demonstração num curso de robótica ou mecatrônica.
O circuito é alimentado por tensões de 12 Volts e a etapa de potência pode ser alimentada com tensões que dependem do motor usado.
Com alimentação a partir de 5 Volts o circuito também funcionará e poderá ser interfaceado com circuitos digitais convencionais e até mesmo com um PC a partir de um buffer apropriado.
COMO FUNCIONA
O circuito pode ser dividido em dois blocos. O primeiro consiste na etapa de controle e o segundo no acionador de potência para motores de passo unipolares. Um diagrama de blocos é mostrado na figura 1, a partir do qual fica mais fácil entender o princípio de funcionamento do controle.
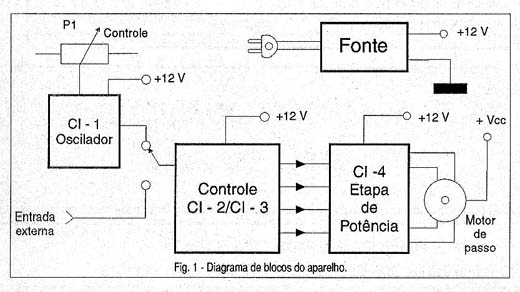
Na entrada temos um multivibrador astável com base no conhecido circuito integrado 555 que tanto pode ser usado na condição de demonstração do funcionamento como para a prova do motor.
O potenciômetro permite controlar a velocidade do motor quando ele for acionado de modo contínuo, o que é conseguido pressionando o interruptor ligado na saída (pino 3) do circuito integrado 555.
Nesta condição o motor de passo pode ser usado como um motor comum de velocidade controlada. Esta velocidade poderá ter sua faixa alterada bastando para isso mudar o valor do capacitor de tempo no astável 555.
Se o circuito não for usado somente em demonstrações, esta saída do astável será mantida sem acionamento e neste ponto aplicamos os pulsos de comando externos.
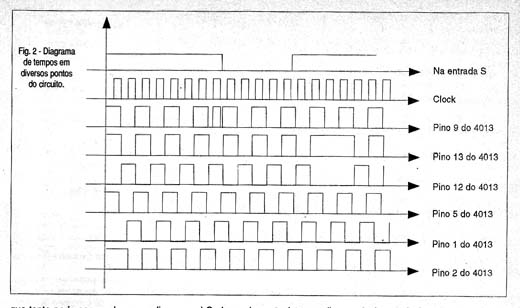
A entrada S determina o sentido de rotação do motor, conforme o diagrama de tempos de pulsos mostrado na figura 2.
Para se obter a rotação do motor o que se faz é ligar o pólo central do motor ao positivo (os fios vermelhos das duas bobinas) e depois colocar as extremidades dos enrolamentos à terra em uma certa sequência. Esta sequência vai determinar a movimentação do rotor.
Para se estabelecer a rotação da maneira desejada é preciso levar em conta alguns critérios como:
a) Cada enrolamento deve ser alimentado por sinais em quadratura.
b) Cada bobina de um mesmo enrolamento deve receber sinais em oposição de fase.
Isso significa que em um determinado instante, que corresponde a um passo encontraremos apenas metade de uma bobina alimentada.
Os sinais de comando são então defasados de 180 graus para as bobinas de um mesmo enrolamento e de 90 graus entre dois enrolamentos.
Para obter a sequência lógica que leve o motor à rotação usamos dois flip-flops do tipo D com base num circuito integrado CMOS do tipo 4013 e duas portas Exclusive-OR (Ou exclusivo) contidas num circuito integrado CMOS do tipo 4070.
As outras duas portas do 4070 não usadas com finalidade lógica de produzir a sequência dos sinais de comando são aproveitadas como inversores.
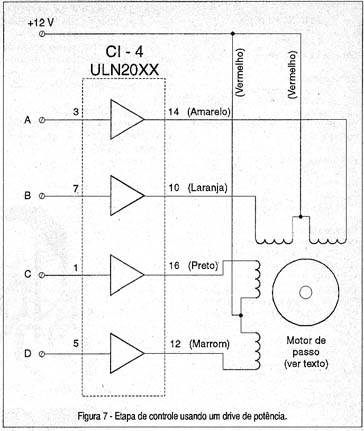
Para controlar o motor de passo podemos fazer uso da série de circuitos integrados ULN20XX que consistem em "buffers" não inversores de potência com elevada capacidade de corrente, justamente indicados para este tipo de aplicação.
Os tipos indicados com suas características são os seguintes:
Utilização com circuitos PMOS na faixa de 14-25 Volts de tensão de entrada:
ULN2002 - 50V/500 mA
ULN2012 - 60V/600 mA
ULN2022 - 95V/500 mA
Utilização com circuitos TTL e CMOS com 5V de tensão de entrada:
ULN2003 - 50V/500 mA
ULN2013 - 60V/600 mA
ULN2023 - 95V/500 mA
Utilização com circuitos CMOS e PMOS com tensões de entrada na faixa de 5 a 15 Volts:
ULN2004 - 50V/500 mA
ULN2014 - 60V/600 mA
ULN2024 - 95V/500 mA
Utilização com circuitos TTL e TTL-LS com tensões de entrada de 5V:
ULN2005 - 50V/500 mA
ULN2015 - 60V/600 mA
ULN2025 - 95V/500 mA
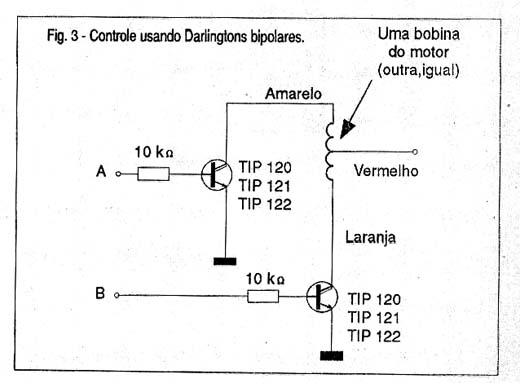
Para acionamento a partir de transistores comuns bipolares podemos usar o circuito da figura 3.
Para o caso de transistores de efeito de campo de potência, nossa sugestão de circuito de acionamento é mostrada na figura abaixo.
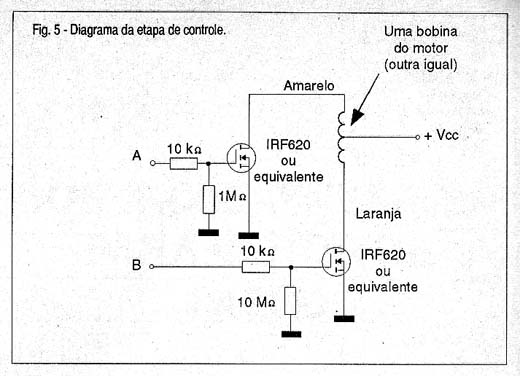
Observe, entretanto que temos de usar os inversores, pois para manter a ordem original dos pulsos a re-inversão é necessária pois os transistores operam invertendo a fase do sinal.
MONTAGEM
Na figura abaixo temos o diagrama da etapa de controle que é formada pelo oscilador, portas Exclusive OR e flip-flops do tipo D.
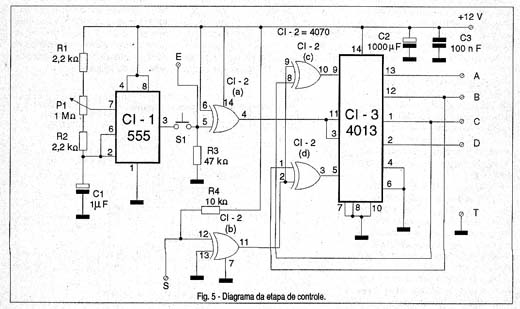
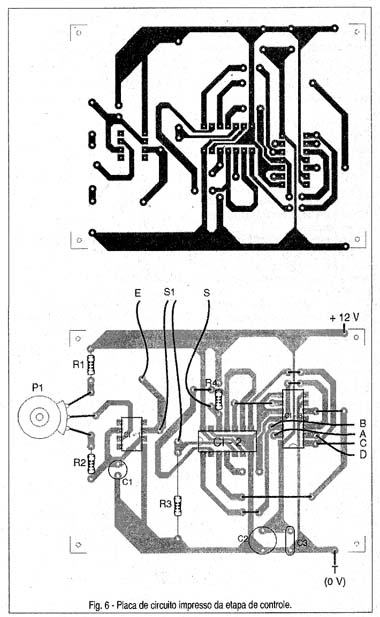
Esta etapa pode ser montada numa placa de circuito impresso com a distribuição de componentes mostrada na figura logo abaixo, ou ainda numa matriz de contactos caso sua finalidade seja experimental ou didática.
Para a etapa de acionamento de potência com os circuitos ULN20XX temos o circuito mostrado na figura 7.
Para uma versão definitiva será interessante usar soquetes, principalmente para o CI da etapa de potência o que permitiria sua substituição no caso de ser trocado o motor.
Os resistores usados são todos de 1/8W e os capacitores comuns com uma tensão mínima de trabalho conforme especificado na lista de materiais.
A fonte de alimentação que pode também ser usada com um motor de 12 Volts com corrente de até uns 600 mA é mostrada na figura 8.
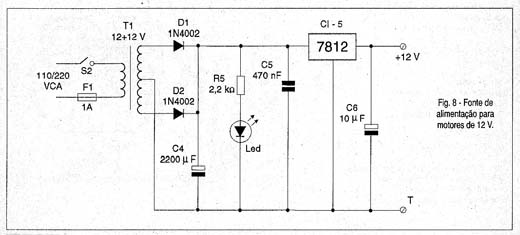
Nesta fonte o transformador tem enrolamento primário conforme a rede de energia e secundário de 12V com pelo menos 1A para o caso do controle de um motor. O circuito integrado deverá ser dotado de um radiador de calor.
PROVA E USO
Para provar basta ligar a unidade à fonte de alimentação e a um motor de passo do tipo universal, observando as cores dos fios. Em alguns tipos, em lugar de dois fios vermelhos pode existir apenas um que então será ligado ao positivo da alimentação.
Feita a conexão, aperte o interruptor de pressão e ajuste P1 para que o motor gire como um motor comum, alterando sua velocidade.
Se sinal na entrada S ela estará no nível alto, determinado pelo resistor de 10 k ohms. Esse nível alto determinará um sentido de rotação para o motor.
Se aterrarmos a entrada S ela passará ao nível baixo e com isso haverá inversão do sentido de rotação do motor.
O cabo de conexão ao motor pode ser algo longo, mas deve ser prevista uma queda de tensão para comprimentos maiores que 10 metros. Nas aplicações em que o controle deve ficar longe do motor, será interessante usar como interface as saídas A,B,C,D e T e não as saídas do circuito de potência de modo a se reduzir os problemas de perdas.
Para acionar o motor com pulsos de controle vindos de um circuito externo eles devem ser aplicados na entrada E. Esta entrada é compatível CMOS e eventualmente, com alimentação de 5V pode ser excitadas por saídas TTL.
LISTA DE MATERIAL
Circuito de Controle:
Semicondutores:
CI-1 - 555 - circuito integrado - timer
CI-2 - 4070 - Circuito integrado CMOS - 4 portas Ex-OR
CI-3 - 4013 - circuito integrado CMOS - duplo flip-flop D
Resistores: (1/8W, 5%)
R1, R2 - 2,2 k ohms
R3 - 47 k ohms
R4 - 10 k ohms
P1 - 1 M ohms - potenciômetro
Capacitores:
C1 - 1 uF/25V - eletrolítico
C2 - 1 000 uF/16V - eletrolítico
C3 - 100 nF - cerâmico
Diversos:
Placa de circuito impresso, soquetes para os circuitos integrados, fios, solda, botão para o potenciômetro, etc.
Etapa de Potência:
CI-4 - ULN20XX - circuito integrado - ver texto
M - Motor de passo - ver texto
Diversos:
Placa de circuito impresso, fios, solda, etc.
Fonte de Alimentação:
Semicondutores:
CI-5 - 7812 - circuito integrado - regulador de tensão
D1, D2 - 1N4002 ou equivalentes - diodos de silício
LED - LED vermelho comum
Resistor: (1/8W, 5%)
R1 - 2,2 k ohms
Capacitores:
C4 - 2 200 uF/25V - eletrolítico
C5 - 470 nF - cerâmico
C6 - 10 uF/16V - eletrolítico
Diversos:
S2 - Interruptor simples
F1 - 1 A - fusível
Placa de circuito impresso, suporte de fusível, cabo de alimentação, radiador de calor para o circuito integrado, caixa para montagem, fios, solda, etc.

