










A exploração do espaço, especificamente do vizinho Planeta Marte, está sendo uma ótima oportunidade para se demonstrar todo o grau de sofisticação que a robótica atingiu em nossos tempos. De fato, as condições climáticas do planeta vermelho, a distância enorme em que ele se encontra, o ambiente hostil, a superfície árida e acidentada em que o veículo deve se movimentar são os principais desafios que a Mars Exploration Rover Mission está enfrentando. Para nossos leitores, "ligados" na robótica nada melhor do que analisarmos neste artigo toda a tecnologia que envolve a construção dos dois Rovers (Robô Móvel) que já se encontram em atividade na superfície do Planeta Marte.
Quando se fala em mandar uma sonda automática (robô) para o planeta Marte, o segundo mais próximo (o primeiro é Vênus) tudo parece muito simples. No entanto, analisando melhor a situação vemos que se trata de um enorme desafio, que envolve uma tecnologia extremamente complexa, para que tudo dê certo.
Marte e a Terra gravitam em torno do Sol em órbitas levemente excêntricas, a distâncias médias de 225 e 150 milhões de quilômetros respectivamente e com períodos diferentes.
As suas excentricidades fazem com que existam épocas em que Marte se encontra muito próximo da Terra, chegando a 50 milhões de quilômetros e épocas em que ele se encontra bem mais afastado.
A condição mais favorável para enviar uma expedição a Marte, quando ele esteve há pouco mais de 50 milhões de quilômetros ocorreu no final do ano passado.
Foi justamente aproveitando a oposição (Marte se encontra do lado oposto ao do Sol, em relação à Terra), que é a época em que Marte se encontra mais próximo, que se lançou a missão.
No entanto, a nave não faz uma viagem direta para chegar ao planeta vizinho. A nave faz uma órbita de aproximação, uma trajetória curva que intercepta a órbita de Marte no momento em que ele passa pelo local, conforme mostra a figura 2. Esse procedimento visa aproveitar melhor o combustível e também superar limitações técnicas as mais diversas. Em outras palavras,a nave percorre mais do que a distância entre os dois planetas para chegar até Marte.

Isso significa que interceptar o planeta vermelho e descer na sua superfície é preciso contar com uma precisão de cálculos e de movimentos muito grande.
Mas o problema não termina aí. As condições climáticas que um robô vai encontrar lá são bastante hostis. Marte tem uma atmosfera muito tênue, o que significa que um pára-quedas comum não funciona bem naquele ambiente, sendo preciso um sistema pára-quedas muito mais eficiente e o próprio clima que vai ser encontrado na superfície de é extremamente adverso, mesmo para um robô.
Alguns pesquisadores comparam o clima da superfície de Marte, nas regiões equatoriais (de clima mais ameno), ao de um deserto terrestre extremamente seco situado a uma a altura de 17 mil metros. Nada de oxigênio, baixa pressão, nenhuma umidade e temperaturas que durante o dia sobem para pouco mais de 5 oC e à noite caem para menos de -96 oC!
Mesmo para uma máquina isso é muito. Ela deve ser muito robusta e protegida para enfrentar tudo isso. Assim é o "spirit" o primeiro dos robôs exploradores marcianos e o "Opportunity", o segundo rover que também já encontra em Marte e de que vamos falar a seguir.
A Missão
Foram dois robôs gêmeos, "Spirit" e "Opportunity" que foram lançados em direção à Marte em 10 de junho e 7 de julho de 2003, em busca de respostas principalmente sobre a história da existência de água naquele planeta. Os dois tinham dada de descida previstas para 3 e 24 de janeiro de 2004, o que realmente ocorreu pouco antes da redação deste artigo.
Quando o airbag que protege os robôs contra o impacto na superfície de Marte abriu, os robôs passaram a obter imagens panorâmicas de Marte e depois iniciaram uma série de investigações percorrendo o terreno das vizinhanças.
Desde há muito, o homem tem a curiosidade de saber se em Marte existiu água um dia, e se existe ainda. Isso se justifica, pois a presença de água poderia indicar que Marte abrigou ou ainda abriga forma de vida. Mais do que isso facilitaria uma futura colonização.
Acreditamos que a Terra não é o único local do Universo que pode abrigar vida. Planetas, com condições favoráveis, poderiam ter formas de vida, diferentes da nossa.
No entanto, apesar de toda a nossa tecnologia, só temos certeza de um planeta que abriga vida: a Terra. Assim, a possibilidade de encontrarmos vida em Marte, pois primitiva que seja, viria a comprovar a hipótese que outros planetas podem abrigá-la.
Para realizar experimentos e investigações científicas na superfície de Marte, os rovers da Mars Exploration Rover Mission contam com um conjunto sofisticado de instrumentos.
Os seguintes instrumentos estão sendo utilizados pelo Sprit e pelo Opportunity:
* Câmara panorâmica (PanCam) para investigar a estrutura, textura e mineralogia do terreno.
* Miniture Thermal Emission Spectrometer (Mini-TES) - O Espectrômetro e Emissão Térmico Miniatura identifica rochas que sejam promissoras para um exame mais próximo e determinação do processo de formação. Ele também pode ser apontado para o céu para analisar as variações da temperatura da atmosfera marciana.
* Espectrômetro de Mössbauer (MB) - trata-se de um instrumento para investigação da mineralogia de rochas que tenham compostos de ferro e também solos.
* Alpha Particle X-Ray Spectrometer (APXS) - O Espectrômetro de Partículas Alfa e Raios X é usado para analisar a abundância dos elementos que compõem as rochas e solos.
* Imãs - que são usados para coletar partículas magnéticas de poeira. O Espectrômetro de Mösbauer e de partículas alfa vai analisar as partículas que são coletadas por esses imãs.
* Microscope Imager (MI) - Esse instrumento vai obter imagens de alta resolução de rochas e solos.
* Rock Abrasion Tool (RAT) - Ferramenta de Abrasão de Rocha - trata-se de uma ferramenta que remove poeira e cobertura das superfícies das rochas expondo material fresco para análise.
Movimentando-se na superfície de Marte os robôs vão fazer um trabalho de investigação geológica. Cada um pode ser considerado equivalente a um geólogo que pode caminhar e colher amostras.
As câmaras de TV montadas em mastros de 1,5 metros proporcionam uma visão estereoscópica de 360 graus, dando uma visão equivalente a do olho humano.
O braço robótico é capaz de movimentos que são semelhantes ao de um braço humano podendo fixar instrumentos diretamente sobre rochas e sobre o solo. No próprio braço existe uma câmara microscópica que serve para visão mais próxima de rochas e do solo.
Os cientistas comparam o Spirit a uma criatura que precisa ser mantida viva para ser capaz de explorar.
Analisemos melhor a construção dos dois robôs, lembrando que os dois são iguais..
As Partes do Rover
a) Corpo
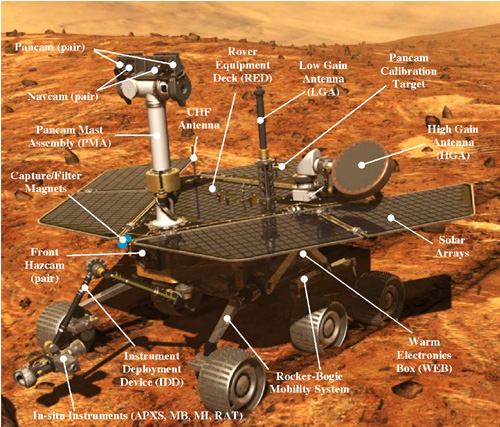
Trata-se de uma estrutura que abriga os "órgãos vitais" do Rover. Tecnicamente esse corpo é chamado Warm Electronics Box ou WEB. Sua construção robusta abriga os circuitos eletrônicos e as baterias do robô. Podemos dizer que se tratam de funções equivalentes ao cérebro e coração.
A construção dessa parte do rover é feita de tal forma a proteger os "órgãos vitais" mantendo-os numa temperatura controlada.
A parte aquecida do robô é fechada na parte de cima por uma peça triangular denominada Rover Equipment Deck (RED). Essa peça permite que o robô funcione como um carro conversível possibilitando a
saída do mastro com as câmeras para o ambiente externo.
A pintura prateada das paredes do corpo do rover mantém o calor mesmo quando as temperaturas noturnas caem para - 96 oC.
Na figura 2 mostramos detalhes dessa estrutura.

b) Cérebro
Trata-se do conjunto de computadores que processam a informação. Os circuitos que formam os cérebro do Rover estão instalado num módulo denominado Rover Electronics Module ou REM.
Esses circuitos são dotados de uma interface que permite ao computador principal se comunicar com os instrumentos e sensores. Essa interface é chamada Versa Module Europa bus ou simplesmente VME bus.
Esse barramento (bus) é um novo padrão de interface usada para controle e comunicação de motores de rovers, instrumentos científicos e funções de comunicação.
c) memória
Um tipo especial de memória resistente à radiação é utilizada para o armazenamento de informações e programas. Essa memória tem recursos que a impedem de perder a informações nos períodos noturnos, quando o rover é desligado.
A memória on-board tem 128 MB de DRAM com detecção e correção de erros e 3 MB de EEPROM.
d) "Nervos" para equilíbrio e posicionamento
A posição em 3-eixos do robô é controlada pelo Inertial Measurment Unit (IMU). As informações obtidas por esse sistema possibilitam ao rover executar movimentos precisos em qualquer direção.
e) Monitoramento da "saúde" do Rover.
Para essa finalidade são usados recursos para se registrar os sinais de saúde do robô, como a temperatura, carga da bateria e outras funções "vitais".
A preocupação principal é com a estabilidade da temperatura e com sua capacidade de se comunicar com a terra. Outros pontos a serem monitorados são o armazenamento de energia, produção de energia pelas células durante o dia Marciano denominado "sol" .
As Comunicações
Todas as atividades do rover, como obter imagens, movimentar-se e operar os instrumentos, são realizadas por comandos transmitidos numa seqüência enviada pela equipe aqui da Terra.
O robô gera uma engenharia constante, limpeza e análise por telemetria que são armazenadas para eventual transmissão para a terra quando precisam de informações do rover.
* temperature controls: aquecedores internos
Da mesma forma que o organismo humano o Mars Exploration Rover não pode funcionar bem com muito frio. De modo a manter seu funcionamento normal, a faixa mantida é de -40 oC a +40 oC.
Existem diversas formas de se manter a temperatura correta dos equipamentos do rover:
* Evitando o escape de calor através de uma pintura apropriada
* Prevenindo o escape de calor através de um isolação denominada "aerogel"
* Usando aquecedores
* Controlando a ação dos aquecedores através de termostatos e chaves.
* Usando um sistema de rejeição de calor.
*
Necessidade de Controle de Temperatura em Marte
Os métodos de controle de temperatura vistos anteriormente são muito importantes tanto para que o rover não "morra"durante a viagem pelo frio espaço, como também já na superfície de Marte.
Como Marte está mais afastado da Terra, e sua atmosfera é muito mais rarefeita, além dele não receber muito calor, o pouco calor que ele consegue absorver durante a insolação é facilmente perdido durante as noites marcianas.
Assim, enquanto durante o dia a temperatura sobe para uns poucos graus acima de zero nas condições mais favoráveis, durante a noite ela cai rapidamente, chegando em alguns casos a -99 oC.
Sabemos que, para equipamentos de alta tecnologia em geral, muito mais perigoso que uma temperatura extrema são as variações rápidas. No caso de Marte temos ainda o agravante que a secura extrema da atmosfera, e as propriedades térmicas do solo, fazem com que solo e ambiente tenham temperaturas oscilando entre valores extremos muito rapidamente.
Pescoço e Cabeça
O que no rover parece um pescoço e uma cabeça é chamado Pancan Mast Assembly. Essa estrutura se eleva a partir da base a uma altura da ordem de 1,4 metros, possibilitando às câmaras dar uma visão semelhante à que teria uma pessoa, um "geólogo humano".
O mastro Pancam tem duas finalidades:
* Agir como um periscópio para o instrumento Mini-TES que está montado dentro do corpo do rover, por motivos térmicos.
* Proporcionar uma posição mais favorável para a visão das Pancams e Navcams.
A finalidade básica do mastro Pancam é possibilitar ao rover uma visão a distância. Tanto mais alto ele fica, mais pode-se ver.
Um motor para o mastro Pancam inteiro gira as câmaras e o Mini-TES de 360 graus no plano horizontal. Outro motor faz a elevação, podendo apontar a câmara para pontos 90 graus acima e abaixo do horizonte. Existe um terceiro motor para a elevação do Mini-TES que o habilita a apontar 30 graus acima e 50 graus abaixo do horizonte.
Durante a viagem o conjunto Mastro-Pancam fica preso contra o deck do rover numa configuração bastante firme. Quando o módulo de "aterrissagem" abre, os cintos que o prendem são soltos por um mecanismo denominado pyros. Trata-se de um mecanismo semelhante que se usa no disparo de uma arma, projetado em 1960 para a missão Apollo. Ë o método mais seguro encontrado até hoje de soltar cintos e objetos fortes numa nave.
Na figura 3 temos detalhes do mastro Pancam.

Olhos e Outros Sentidos
O rover possui câmeras e outros instrumentos que fornecem informações sobre o ambiente. Se compararmos essas câmaras a olhos, podemos dizer que o rover possui 9 "olhos".
Seis câmaras de engenharia ajudam na navegação enquanto que três são usadas na investigação cientifica. Cada câmara contém um conjunto óptico de acordo com o tipo de aplicação a que se destina.
Temos então os seguintes casos:
Quatro Câmaras de Engenharia Hazcams (Hazard Avoidance Camaras)
Como o nome inglês indica, são usadas para evitar acidentes. Elas são montadas na frente e na traseira do rover e a imagem obtida é do tipo monocromático.
Essas câmaras são usadas para captar imagens tridimensionais (3-D) que, analisadas pelo software de bordo e pela equipe na Terra, podem evitar batidas contra obstáculos inesperados.
Trabalhando em paralelo com o software é possível ao rover tomar suas próprias decisões sobre as manobras a serem executadas em caso de necessidade. Isso se justifica, pois a imagem enviada à terra demora vários minutos para chegar e um comando levará o mesmo tempo para chegar até lá e ser executado. Nesse intervalo o rover já teria se envolvido num acidente...
Cada câmara tem um amplo campo de visão, algo em torno 120 graus.
Duas Câmaras de Engenharia Navcam (Navigation Cameras)
Elas são montadas no mastro, e também enviam imagens monocromáticas com sensibilidade para a faixa de luz visível, permitindo captar imagens tridimensionais (3-D). A Navcam tem uma operação "estéreo", cada qual com um campo de 45 graus. Essa disposição visa simular a visão humana e avaliar distâncias dos objetos focalizados (dois olhos).
Elas trabalham em conjunto com as Hazcams de modo a proporcionar uma visão complementar do terreno.
Duas Câmaras Cientificas (Panoramic Cameras)
Trata-se de um par de câmaras coloridas de alta resolução montadas no mastro do rover, fornecendo imagens tridimensionais da superfície marciana.
Com finalidade científica, o campo de visão e a altura dessas câmaras imitam a resolução do olho humano (0,3 miliradianos), dando assim uma visão semelhante àquela que um geólogo humano teria, ficando em pé na superfície de Marte.
Os detectores da Pancam têm 8 filtros por "olho" e, entre os dois "olhos" existe um total de 11 filtros especiais, mais filtros de duas cores e imagem-solar para obter imagens multi-espectrais. A Pancam também faz parte do sistema de navegação apontando para o Sol, que pode ser tomado por referência, sendo usado como uma bússola. As informações sobre a posição do Sol, com a hora do dia informa aos navegadores a posição exata do rover na superfície do planeta.
Science Microscopic Imager:
Trata-se de uma combinação de microscópio e câmara de vídeo. Essa câmara monocromática é montada no braço robótico de modo a obter imagens muito próximas do solo e rochas. A figura 4 mostra a posição dessa câmaras no rover.

O Braço
O braço do robô, tecnicamente chamado instrument deployement device, tem por finalidade manusear rochas e solo para testes e para obter imagens próximas. Na figura 5 uma visão do braço.

O braço robótico se assemelha a um braço humano, pois também tem três juntas: ombro, cotovelo e pulso. Com isso sua mobilidade permite posicionar as garras em qualquer ponto com precisão, tanto para colher material como para obter imagens próximas através da câmara microscópica.
As ferramentas robóticas do braço são detalhadas na figura 6.
Microscopic Imager: Câmara microscópica
Mössbauer Spectrometer: Analisa a composição das rochas e do solo
Alpha Particle X-Ray Spectrometer: Analisa a composição elementar de rochas e solo
Rock Abrasion Tool (RAT): Raspa as superfícies das rochas expondo material fresco

Trinta por cento da massa de titânio do braço robótico corresponde aos instrumentos que ele manuseia no final do braço. Esse peso torna um desafio manusear e controlar o braço com precisão.
É algo como controlar uma bola de boliche na extremidade do braço. Assim, o braço é feito o mais leve quanto seja possível contendo furos nas suas partes de titânio de modo a minimizar o peso.
Protegendo o Braço
Depois de completada uma missão num local, e o robô começa a andar novamente, a sua posição do braço estendido é inconveniente e perigosa. Os movimentos de balanço podem colocar em risco o equilíbrio do veículo já que, como vimos, existe um grande peso na sua extremidade.
Assim, antes do robô partir para um novo local de pesquisa, o braço é recolhido, ficando preso num pino existente na torre. Esse pino mantém o braço firme, sendo capaz de suportar choques de até 6 Gs (Gravidades ou 9,8 m/s2). Esse choque equivale a deixar cair um objeto de uma altura de 20 cm aqui na terra. No lançamento e chegada à Marte, entretanto o sistema que segura o braço é capaz de suportar 42 Gs. Lembramos que a gravidade na superfície de Marte, dada sua massa menor, é menor do que a que temos na superfície da Terra.
Rodas e Pernas
O Mars Exploration Rover possui seis rodas, cada qual com seu próprio motor.
As duas rodas dianteiras e traseiras possuem também motores de direção (1 cada). Esses motores permitem mudar a direção do movimento do veículo de tal forma que ele pode fazer curvas de 360 graus praticamente sem sair do lugar.
Como as Rodas se Movem
O sistema de suspensão das rodas é semelhante ao rover Sojourner damissão Pathfinder.
Trata-se de um sistema denominado bogie usado nas antigas ferrovias. Tratam-se de "carros" ou conjunto de seis rodas que podem se deslocar para fazer curvas no trilho.
Esse sistema tem também uma montagem diferencial que permite ao rover se manter em equilíbrio independentemente das irregularidades da superfície em que ele se desloca. A finalidade desse sistema é impedir balanços bruscos do veículo quando ele se desloca por um terreno acidentado.
O rover é projetado para poder inclinar até 45 graus em qualquer direção sem tombar. No entanto, um sistema de segurança impede que ele passe um limite de 30 graus, quando em operação.
O projeto do sistema de suspensão também permite que ele passe através de obstáculos, como rochas ou buracos que sejam maior do que o diâmetro de uma roda (25 cm). As rodas levantam pulando o obstáculo.
Velocidade
A velocidade máxima do rover em chão firme é de 5 cm por segundo. No entanto, para ter mais segurança, o rover é equipado com um software contra acidentes, que faz com que ele pare e verifique o local a cada 20 segundos. Dessa forma, a velocidade média do rover é da ordem de apenas 1 cm por segundo.
Sua programação é para andar por 10 segundos e então parar para analisar o terreno por 20 segundos e, somente depois continuar por mais 10 segundos.
Energia
A energia para o rover vem de painéis solares e baterias. O painel se assemelha a "asas" que recolhem a luz solar transformando-a em eletricidade.
Quando totalmente iluminado, o painel solar gera aproximadamente 140 W de energia. O rover precisa de aproximadamente 100 watts para operar, o equivalente a uma lâmpada incandescente comum.
Fazendo uma comparação as células do rover da missão Sojourner forneciam apenas 16 watts em 1997. Trata-se de uma potência equivalente a uma pequena lâmpada incandescente, do tipo usado para iluminar o interior de fornos.
O sistema inclui ainda duas baterias recarregáveis que alimentam o rover quando não há sol disponível.
Com o tempo, as baterias sofrem uma degradação não podendo mais ser completamente recarregadas. Os painéis solares também, tanto pela exposição à radiação e poeira.
Assim, perto do final da missão, estima-se que a potência disponível para o rover estará reduzida a uns 50 watts apenas.
A diminuição da potência disponível nos painéis solares ocorre pela mudança do ângulo de incidência da luz do Sol, quando o hemisfério em que está o rover passar do verão para o inverno, pois Marte, como a Terra, tem um eixo de rotação inclinado em relação a órbita o que resulta no fenômeno das mudanças de estações no decorrer do ano marciano de 23 meses terrestres.
Comunicações
Na Terra, o acompanhamento da missão Mars Exploration Rover será feito pelo Deep Space Network, uma rede de estações espalhadas pelo mundo com mais de 40 anos. As estações usadas estão em Goldstone no Deserto de Mojave (California), perto de Madri (Espanha) e perto de Canberra (Austrália).
Cada complexo é dotado de uma antena de 70 metros de diâmetro e pelo menos duas antenas de 34 metros de diâmetro, além de antenas menores. Os equipamentos ligados a essas antenas estão em contacto permanente com o Jet Propulsion Laboratory da NASA em Pasadena, Califórnia.
O rover, por sua vez, é dotado de um conjunto de antenas para recepção e transmissão de sinais de rádio.
São usados dois tipos de antenas: antenas de baixo ganho e de alto ganho que estão localizadas na parte traseira do deck de equipamentos.
A antena de baixo ganho envia e recebe sinais em todas as direções, ou seja, é do tipo omni-direcional. Sua finalidade é transmitir sinais para a Rede DSN (Deep Space Netowork) na terra. Essa rede de antenas fica em Camberra na Austrália (ver figura 9).
A antena de alto ganho envia informações dirigidas a uma direção que pode ser controlada. Isso significa que ela pode ser apontada diretamente para a terra, concentrando assim mais energia na direção do ponto visado.

O rover pode enviar seus sinais não apenas para a terra como também para estações retransmissoras que estejam em órbita de Marte como a 2001 Mars Odissey e o Mars Global Surveyor. Essas estações podem captar os sinais e retransmiti-los para a terra. Elas também podem ser usadas para retransmitir para os rovers sinais procedentes da terra.
A vantagem no uso dessas estações retransmissoras está na sua proximidade do rover. As freqüências usadas para comunicações com as estações em órbita marciana estão na faixa de UHF.
A utilização do sistema de comunicações é planejada cuidadosamente. Nos minutos que precedem à descida, a transmissão dados se torna muito lenta, da ordem de 10 bits por segundo, o que corresponde à 2% da capacidade da antena de médio ganho. Nesse tempo, apenas informações sobre a descida na forma de 36 tons de 10 segundos.
Antes da primeira noite em Marte, depois da descida, a antena de alto ganho é preparada para, no dia seguinte, entrar em contacto direto com a terra, agora numa taxa de 11 k bits por segundos.
Um pouco antes de cada um dos rovers descer, também temos a transmissão de informação para os dois retransmissores em órbita de Marte. Essas informações retransmitidas para a terra numa taxa de 128 kbits por segundo.
Galeria de fotos em:
http://marsrovers.jpl.nasa.gov/gallery/press/spirit/

Características Técnicas:
Peso: 180 kg
Autonomia por dia marciano (sol): 40 metros
Autonomia total : 90 sols (92 dias terrestres)
Potência elétrica total: 140 W
Aquecimento atômico: 2,7 gramas de rádio-isótopo
Faixa de Freqüências de comunicações com a terra: Banda X
Faixa de Freqüências de comunicação com as estações retransmissoras: UHF





